使用 OpenClaw 控制机器人
本文介绍如何使用 OpenClaw 连接捷勃特机器人(真实机器人或云端仿真机器人),通过自然语言控制机器人,并完成基础控制操作。
快速开始
1. 环境准备
开始前请先完成以下准备工作:
- 如果已有真实机器人,可直接使用;如果暂时没有真机,也可以在 Airbot 上申请一台云端仿真机器人进行体验。Airbot 控制台
- 安装 OpenClaw:OpenClaw 官网
- 配置 Agent Skills 运行环境:请确保本地已安装并配置 Node.js,参考教程:Node.js 下载与安装指南
2. 安装 Agent Skills
在终端运行以下命令,启动交互式安装流程:
bash
npx skills add https://dev.sh-agilebot.com -gTIP
执行后,安装工具会自动扫描本地已安装的 Agent。请根据终端提示选择 OpenClaw 完成技能安装。详细说明请参考:Agent Skills
使用示例
NOTE
- 使用云端仿真机器人时,请按以下完整步骤操作。
- 如果使用的是真实机器人,则只需要从第 5 步开始执行。
- 在 Airbot 控制台中申请并开通机器人资源,启动机器人,并记下 visitor 账户的密码。
- 访问机器人,并使用上述账户密码登录。
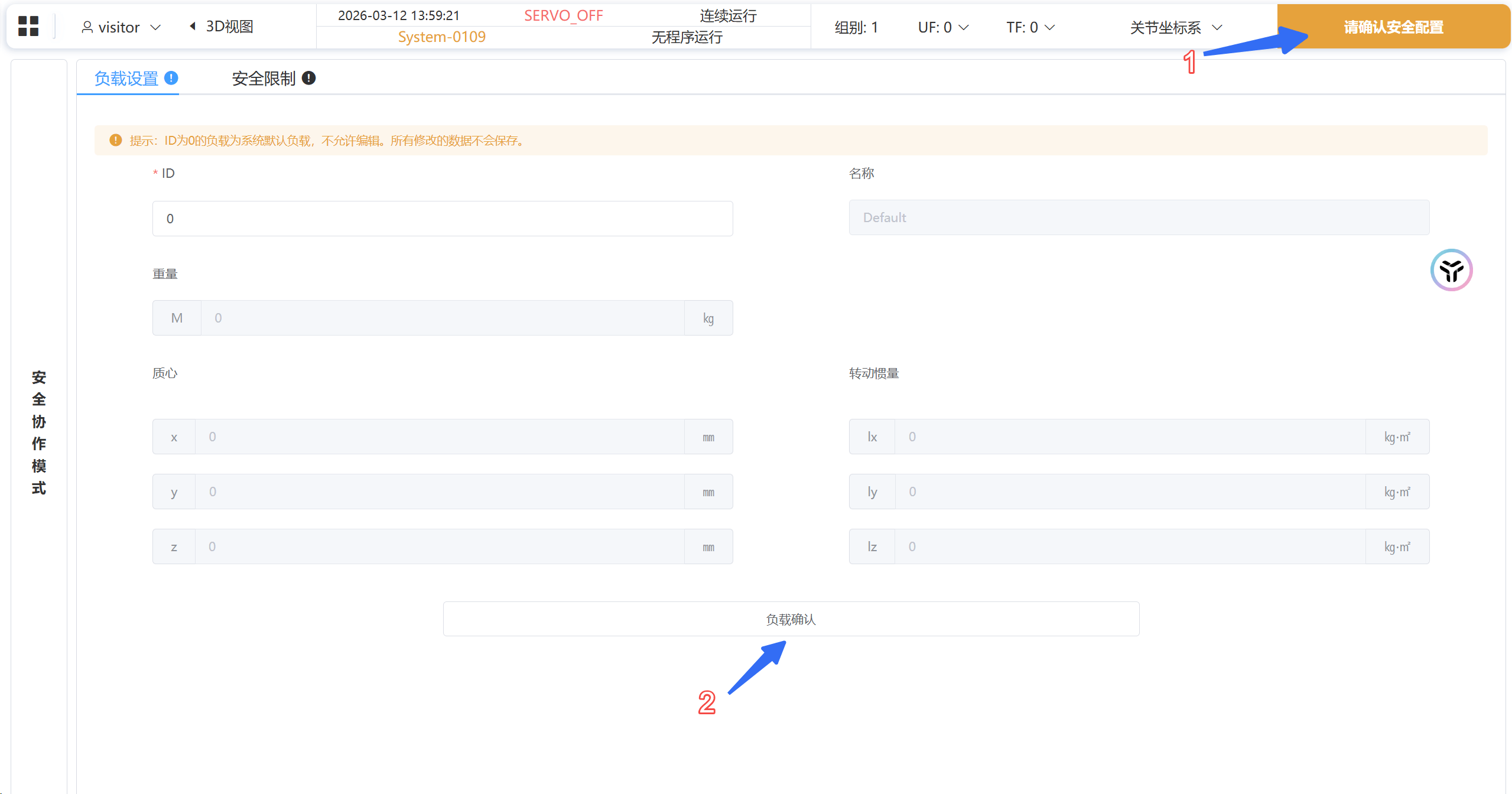
- 确认负载设置:
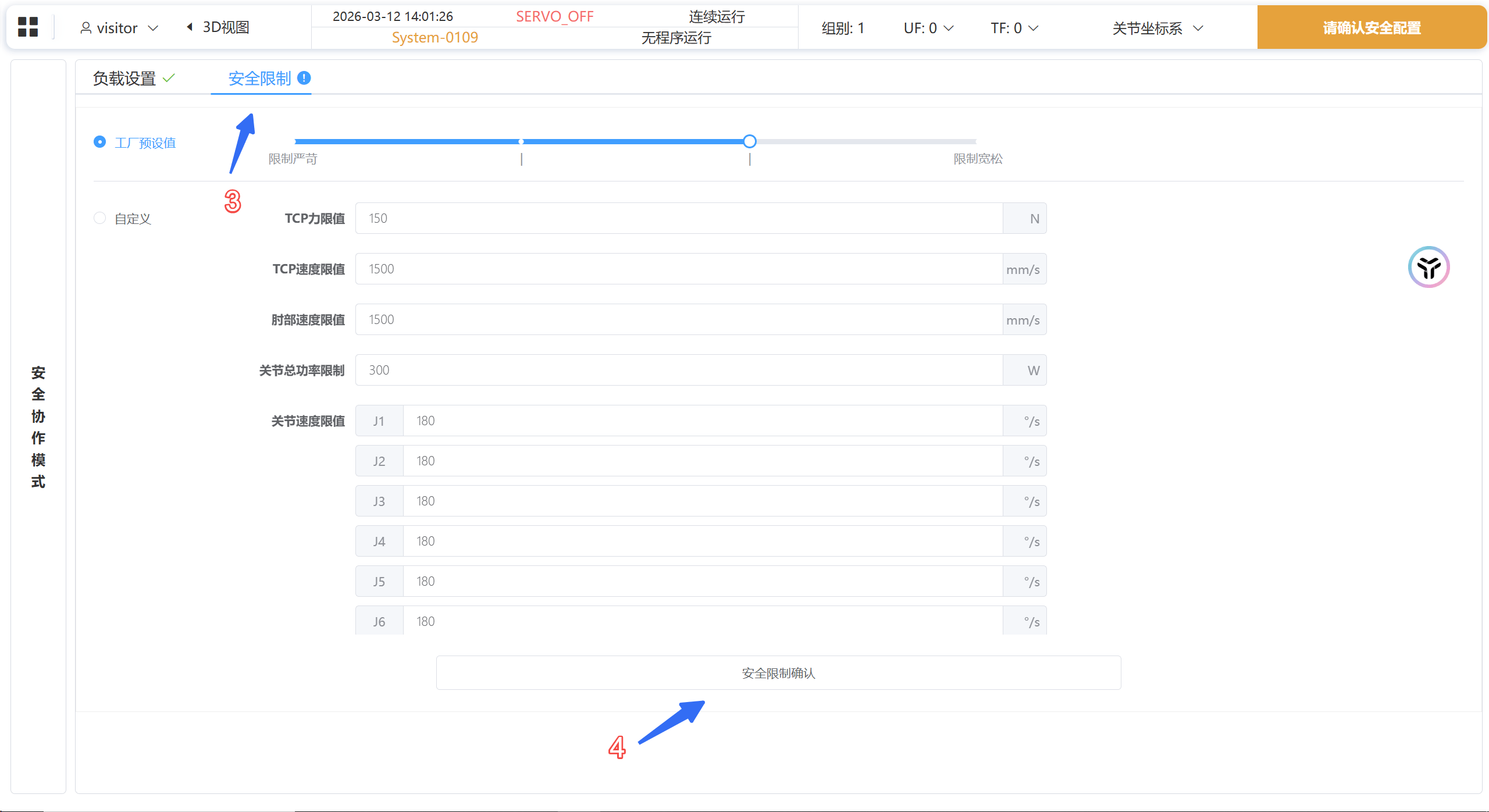
- 确认安全设置:
- 按
Ctrl+F1重置错误并上电。 - 打开 OpenClaw,向 Agent 描述任务,例如:
text
我现在有一个AGILEBOT机器人,IP地址是192.168.1.100,请帮我连接机器人,并读取机器人的当前位置。NOTE
- 云端仿真机器人:IP 地址为浏览器地址栏中的域名部分(去掉端口号及之后的路径)。例如,地址栏显示
http://fl6a677xl1xw.instances.airbot-dev.sh-agilebot.com:5613/#/system/first_boot_confirm,则 IP 地址为fl6a677xl1xw.instances.airbot-dev.sh-agilebot.com。 - 真实机器人:默认 IP 地址为
10.27.1.254。
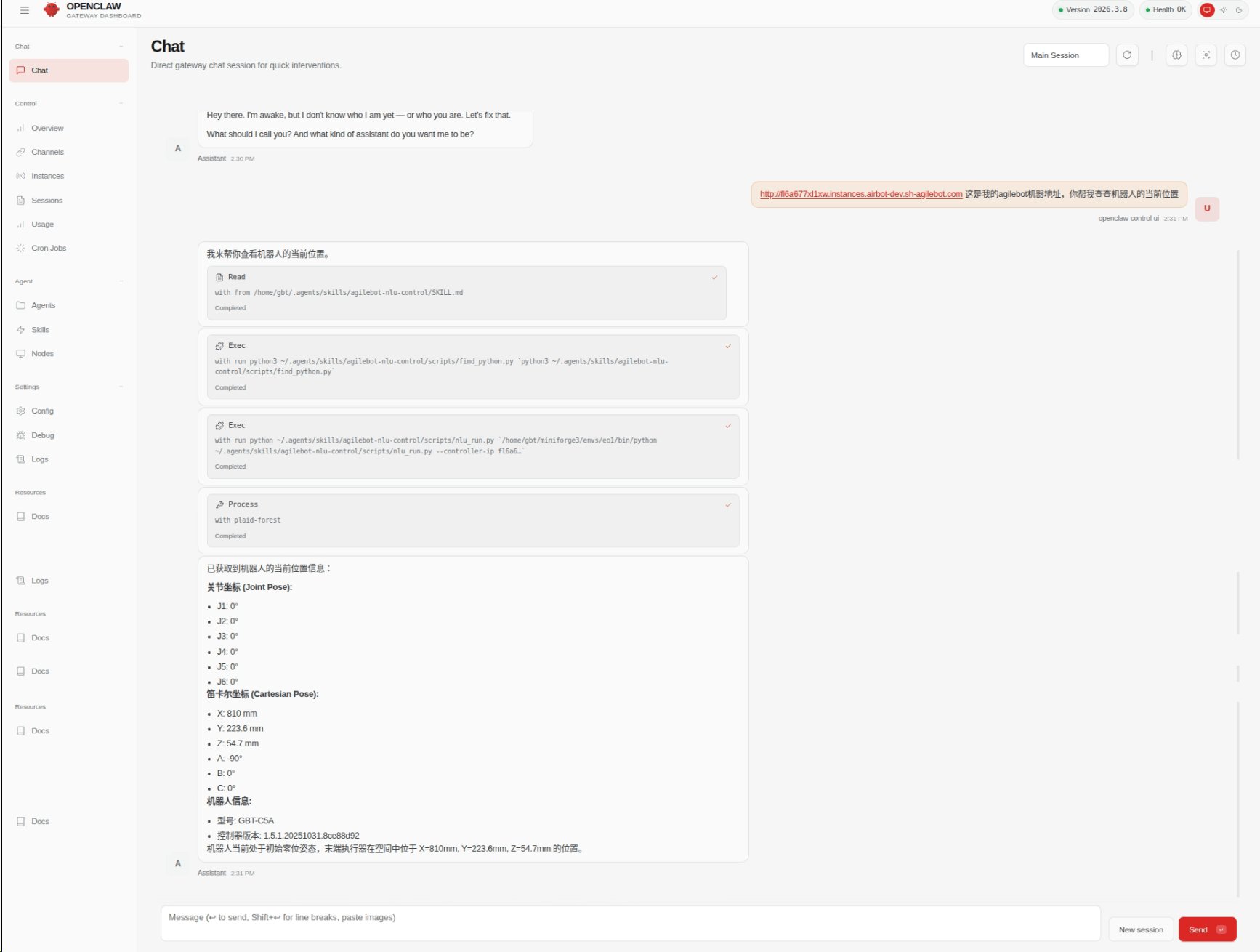
对话效果演示
以下是在 OpenClaw 中与 Agent 对话的实际效果:
警告
安装 OpenClaw 与 Agent Skills 后,相关能力将以 Agent 的完整权限运行,请在受信任的环境中使用。
涉及真实机器人动作时,请务必在安全环境中操作,并先确认机器人状态、坐标系和动作范围。