Moveit2+Gazebo 联合仿真
本章节介绍如何使用 Moveit2 和 Gazebo 进行捷勃特机器人的联合仿真。首先使用 moveit2 进行运动规划,然后将规划路径通过 action 方式发送给 Gazebo 进行仿真。
您可以结合 Moveit2 和 Gazebo 来实现更复杂的捷勃特机器人仿真场景。请按照以下步骤操作:
终端 1:启动 Gazebo 仿真
首先,在一个终端窗口中启动 Gazebo 仿真:
bash
ros2 launch {机器人型号}_moveit_config gazebo.launch.py例如:
bash
ros2 launch c5a_moveit_config gazebo.launch.py终端 2:启动 Moveit2 和 RViz
然后,在另一个终端窗口中启动 Moveit2 和 RViz:
bash
ros2 launch {机器人型号}_moveit_config gazebo_moveit_rviz.launch.py例如:
bash
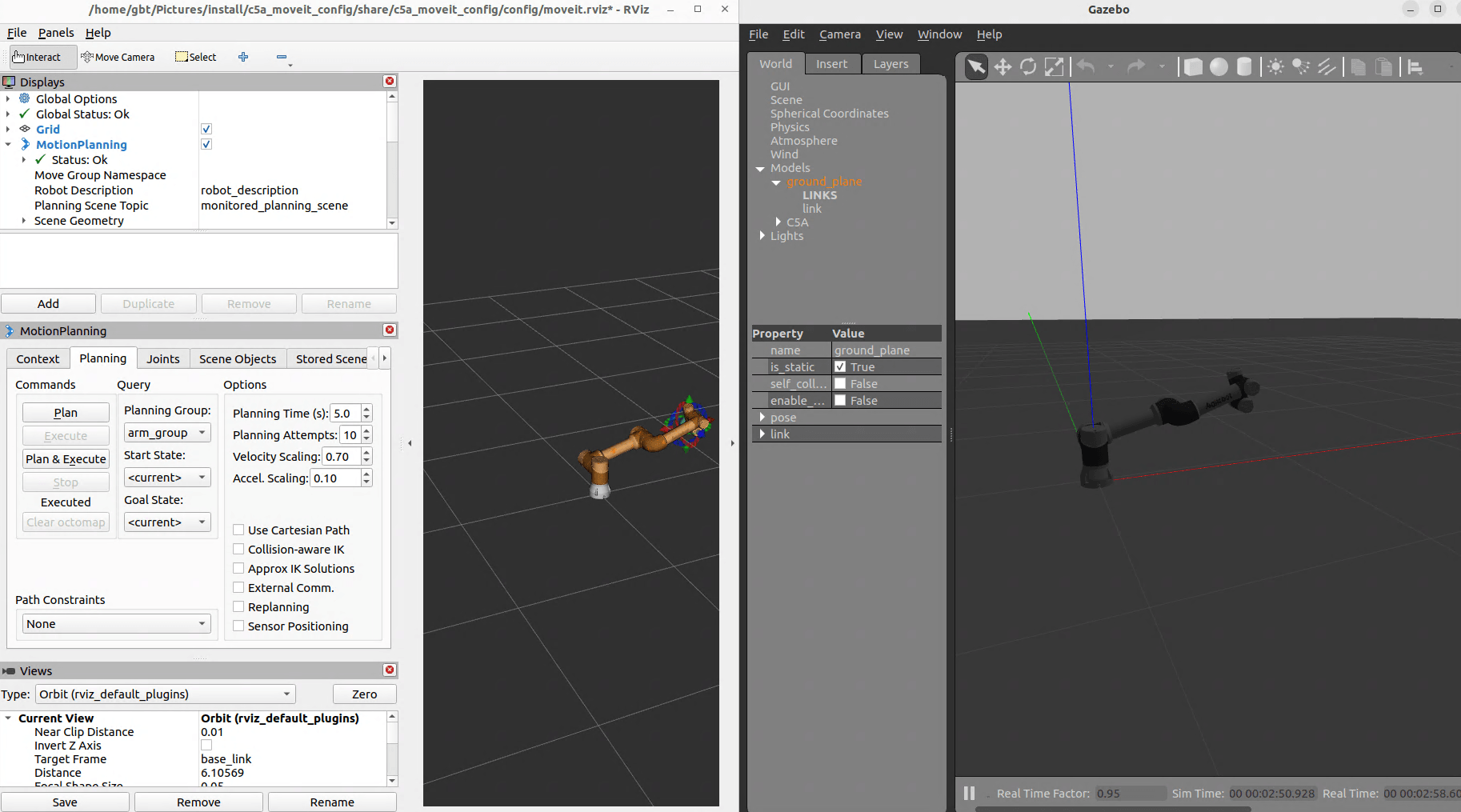
ros2 launch c5a_moveit_config gazebo_moveit_rviz.launch.py这将同时启动 Gazebo 仿真和 Moveit2 的 RViz 界面,使您能够在虚拟环境中对机器人进行运动规划。
支持的机器人型号
当前支持以下协作机器人型号的联合仿真:
- C5A - 5 公斤负载协作机器人
- C7A - 7 公斤负载协作机器人
- C12A - 12 公斤负载协作机器人
- C16A - 16 公斤负载协作机器人
使用时只需将命令中的 {机器人型号} 替换为对应的型号即可,例如:
bash
# C7A 机器人
ros2 launch c7a_moveit_config gazebo.launch.py
ros2 launch c7a_moveit_config gazebo_moveit_rviz.launch.py
# C12A 机器人
ros2 launch c12a_moveit_config gazebo.launch.py
ros2 launch c12a_moveit_config gazebo_moveit_rviz.launch.py
# C16A 机器人
ros2 launch c16a_moveit_config gazebo.launch.py
ros2 launch c16a_moveit_config gazebo_moveit_rviz.launch.py