在 RViz 中显示捷勃特机器人模型
本章节介绍如何使用 ROS 2 在 RViz 中显示捷勃特机器人模型,并通过 GUI 工具进行交互。RViz(ROS 可视化)是 ROS 生态中用于实时可视化机器人模型、传感器数据和环境信息的工具。它可以:
- 加载并显示 URDF 格式的机器人模型
- 可视化激光雷达点云、深度相机点云等 2D/3D 传感器数据
- 显示机器人关节状态、轨迹规划结果和 TF 坐标变换
- 通过交互标记和 GUI 插件,实现对机器人姿态和目标的在线调整
显示效果如下:
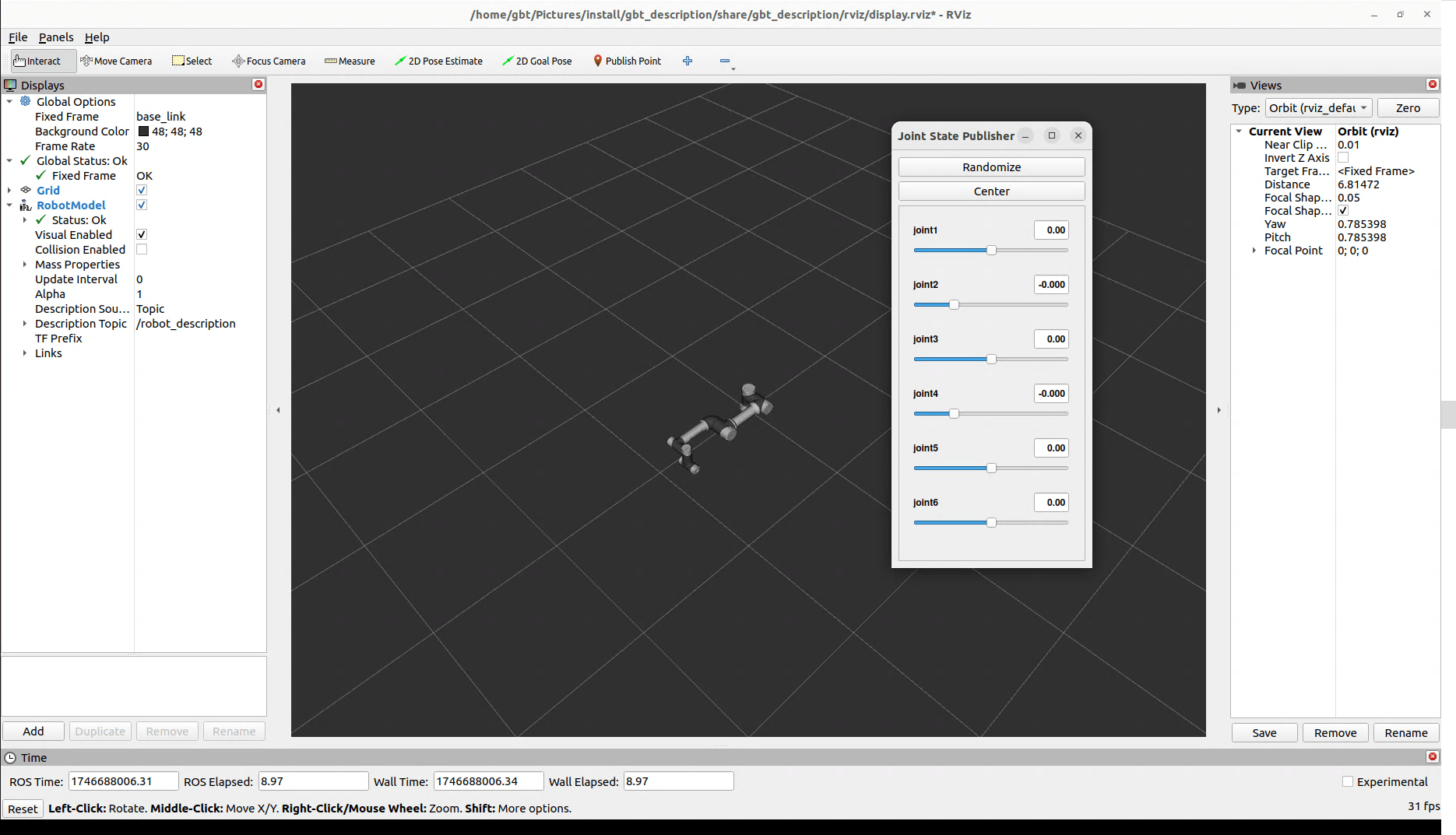
要查看上海捷勃特机器人的 URDF 模型,请执行以下命令启动 RViz:
bash
cd {您的工作目录}
source install/setup.bash
ros2 launch gbt_description display_robot.launch.py robot_type:=<机器人型号>例如,如果您想查看 C5A 型号的机器人:
bash
cd {您的工作目录}
source install/setup.bash
ros2 launch gbt_description display_robot.launch.py robot_type:=C5A其他型号的机器人启动方式类似:
bash
# C7A 机器人
ros2 launch gbt_description display_robot.launch.py robot_type:=C7A
# C12A 机器人
ros2 launch gbt_description display_robot.launch.py robot_type:=C12A
# C16A 机器人
ros2 launch gbt_description display_robot.launch.py robot_type:=C16A目前支持以下协作机器人型号:
- C5A
- C7A
- C12A
- C16A
1. 工作目录是指包含 src 和 install 文件夹的目录,例如:/home/{你的用户名}/ws 这将在 RViz 中加载指定型号机器人的 URDF 模型。
2. 更多机器人型号请访问官网查询,https://www.sh-agilebot.com