用户自定义指令插件
版本 V1.4 | 更新日期:2026 年 3 月 25 日
概述
CM(Custom Module) 是一个用户自定义指令插件,为捷勃特机器人提供了一系列实用的自定义指令。
版本说明
本插件提供两个版本,分别对应不同的 SDK 版本:
SDK v1.7.1.3 版本
- 目录:
CoordinateModifier(SDKV1.7.1.3)/ - 主文件:
CM_oldsdk.py - 兼容 SDK: Python SDK v1.7.1.3
- 兼容机器人软件版本:
- Copper v7.6.X.X
- Bronze v7.6.X.X
SDK v2.0.0.0 版本
- 目录:
CoordinateModifier(SDKV2.0.0.0)/ - 主文件:
CM.py - 兼容 SDK: Python SDK v2.0.0.0
- 兼容机器人软件版本:
- Copper v7.7.X.X
- Bronze v7.7.X.X
版本选择建议
- 使用 SDK v1.7.1.3 版本: 如果您的机器人软件版本为 v7.6.X.X
- 使用 SDK v2.0.0.0 版本: 如果您的机器人软件版本为 v7.7.X.X 或更高
注意: 请根据您的机器人软件版本选择对应的插件版本,确保 SDK 版本与机器人软件版本兼容。
打包说明
插件开发完毕后,需要使用捷勃特插件打包工具进行打包。详细的打包与安装说明请参考:
功能列表
插件提供以下 13 个自定义指令:
- SetTF - 设置工具坐标系参数(直接数值)
- SetUF - 设置用户坐标系参数(直接数值)
- SetTF_R - 从 R 寄存器读取值设置工具坐标系参数
- SetUF_R - 从 R 寄存器读取值设置用户坐标系参数
- SetTF_PR - 从 PR 寄存器读取完整位姿设置工具坐标系
- SetUF_PR - 从 PR 寄存器读取完整位姿设置用户坐标系
- Incr - R 寄存器自增
- Decr - R 寄存器自减
- Strp - 拆解字符串数据到 PR 寄存器
- TFShift - 工具坐标系补正(基于视觉反馈)
- DecToHex - 从十进制转换为十六进制
- TurnCountToR - 将 PR 位姿回转数写入 R 寄存器(单轴)
- RToTurnCount - 将 R 寄存器回写到 PR 位姿回转数(单轴)
指令详细说明
1. SetTF - 设置工具坐标系参数(直接数值)
直接通过数值设置工具坐标系的指定参数。
参数:
ID(int): 工具坐标系 ID 号(1-30)Pos(int): 位置参数编号(1-6)- 1: X 坐标(单位:mm)
- 2: Y 坐标(单位:mm)
- 3: Z 坐标(单位:mm)
- 4: A 角度(单位:度)
- 5: B 角度(单位:度)
- 6: C 角度(单位:度)
Value(float): 参数值
示例:
CALL_SERVICE CM, Set TF, ID=1, Pos=1, Value=111.112. SetUF - 设置用户坐标系参数(直接数值)
直接通过数值设置用户坐标系的指定参数。
参数:
ID(int): 用户坐标系 ID 号(1-30)Pos(int): 位置参数编号(1-6)Value(float): 参数值
示例:
CALL_SERVICE CM, SetUF, ID=1, Pos=1, Value=222.3543. SetTF_R - 从 R 寄存器读取值设置工具坐标系参数
从指定的 R 寄存器读取数值,并设置到工具坐标系的指定参数。
参数:
ID(int): 工具坐标系 ID 号(1-30)Pos(int): 位置参数编号(1-6)R_ID(int): R 寄存器编号
示例:
CALL_SERVICE CM, Set TF_R, ID=3, Pos=1, R_ID=14. SetUF_R - 从 R 寄存器读取值设置用户坐标系参数
从指定的 R 寄存器读取数值,并设置到用户坐标系的指定参数。
参数:
ID(int): 用户坐标系 ID 号(1-30)Pos(int): 位置参数编号(1-6)R_ID(int): R 寄存器编号
示例:
CALL_SERVICE CM, SetUF_R, ID=3, Pos=1, R_ID=15. SetTF_PR - 从 PR 寄存器读取完整位姿设置工具坐标系
从指定的 PR 寄存器读取完整的位姿信息(X、Y、Z、A、B、C),并一次性设置到工具坐标系。
参数:
ID(int): 工具坐标系 ID 号(1-30)PR_ID(int): PR 寄存器编号
示例:
CALL_SERVICE CM, Set TF_PR, ID=2, PR_ID=16. SetUF_PR - 从 PR 寄存器读取完整位姿设置用户坐标系
从指定的 PR 寄存器读取完整的位姿信息,并一次性设置到用户坐标系。
参数:
ID(int): 用户坐标系 ID 号(1-30)PR_ID(int): PR 寄存器编号
示例:
CALL_SERVICE CM, SetUF_PR, ID=2, PR_ID=27. Incr - R 寄存器自增
将指定 R 寄存器的值增加指定的步长。
参数:
R_ID(int): R 寄存器编号Step(float): 自增步长,默认为 1.0
示例:
CALL_SERVICE CM, Incr, R_ID=2, Step=18. Decr - R 寄存器自减
将指定 R 寄存器的值减少指定的步长。
参数:
R_ID(int): R 寄存器编号Step(float): 自减步长,默认为 1.0
示例:
CALL_SERVICE CM, Decr, R_ID=1, Step=19. Strp - 拆解字符串数据到 PR 寄存器
从 SR 寄存器读取字符串数据,拆解后写入 PR 寄存器。
参数:
SR_ID(int): 字符串寄存器编号R_ID_Status(int): R 寄存器编号,用于输出物料检测状态(1 = 有物料,0 = 无物料)PR_ID(int): PR 寄存器起始编号R_ID_Error(int): R 寄存器编号,用于输出错误状态码(0 = 正确,1 = 错误)
数据格式:
- SR 寄存器格式:状态位,数据 1, 数据 2, 数据 3,...
- 状态位:0 = 无物料,1 = 有物料
- 数据映射关系:数据 1→PR 的 X 坐标,数据 2→PR 的 Y 坐标,数据 3→PR 的 C 角度
- 支持分隔符:逗号、分号、竖线、制表符、空格等(自动检测)
- 每个 PR 寄存器存储 6 个分量(X,Y,Z,A,B,C),其中 Z、A、B 保留原值不变
状态码说明:
R_ID_Status:物料检测状态(1 = 有物料,0 = 无物料)R_ID_Error:错误状态码(0 = 正确,1 = 错误)- 状态位 = 0(无物料)→ R_ID_Status=0, R_ID_Error=1(错误)
- 状态位 = 1 且数据格式正确 → R_ID_Status=1, R_ID_Error=0(正确)
- 状态位 = 1 但数据格式错误 → R_ID_Status=1, R_ID_Error=1(格式错误)
示例:
SR[1] = "1,100.5,200.3,45.0"
// 说明:状态位=1(有物料),数据1=100.5(X坐标),数据2=200.3(Y坐标),数据3=45.0(C角度)
// 执行后:PR[1].x=100.5, PR[1].y=200.3, PR[1].c=45.0(Z、A、B保留原值)
CALL_SERVICE CM, Strp, SR_ID=1, R_ID_Status=1, PR_ID=1, R_ID_Error=210. TFShift - 工具坐标系补正(基于视觉反馈 Eye-to-Hand)
通过读取不同的视觉目标点偏差与基准视觉位置的偏差,来计算工具坐标系的相对偏差,从而将偏差输出在工具坐标系中。
参数:
InputTF_ID(int): 基准标定坐标系编号(1-30),默认 1ResultTF_ID(int): 最终算法计算后写入的坐标系编号(1-30),默认 3CamPose_ID(int): 拍照点 PR 寄存器编号,默认 60RefVis_ID(int): 基准视觉模板数据 PR 寄存器编号,默认 61(需要手动写入)ActVis_ID(int): 视觉输出的实际坐标数据 PR 寄存器编号,默认 62(需要手动写入)
示例:
// 假设:
// - TF[1] 为基准标定坐标系
// - PR[60] 存储拍照点位姿
// - PR[61] 存储基准视觉模板数据(需要手动写入)
// - PR[62] 存储实际视觉坐标数据(需要手动写入)
// - TF[3] 为计算结果输出坐标系
CALL_SERVICE CM, TFShift, InputTF_ID=1, ResultTF_ID=3, CamPose_ID=60, RefVis_ID=61, ActVis_ID=62工作原理:
- 读取基准工具坐标系(InputTF_ID)的位姿数据
- 读取拍照点位姿(CamPose_ID)PR 寄存器数据
- 读取基准视觉模板数据(RefVis_ID)PR 寄存器数据
- 读取实际视觉坐标数据(ActVis_ID)PR 寄存器数据
- 通过坐标变换矩阵计算工具坐标系的相对偏差
- 将计算结果写入结果工具坐标系(ResultTF_ID)
注意事项:
- 所有 PR 寄存器必须在使用前手动创建并写入正确的位姿数据
- 基准视觉模板数据(RefVis_ID)和实际视觉坐标数据(ActVis_ID)需要根据视觉系统输出手动写入对应的 PR 寄存器
- 计算结果会自动进行误差验证,并在日志中输出误差分析信息
- 工具坐标系 ID 必须在 1-30 之间
11. DecToHex - 从十进制转换为十六进制
将 R 寄存器中的十进制数值转换为十六进制字符串,并写入 SR 寄存器。
参数:
R_ID(int): R 寄存器编号,包含需要转换的十进制数(支持整数和浮点数)SR_ID(int): SR 寄存器编号,用于保存转换后的十六进制字符串
转换规则:
- 浮点数处理:截断(直接丢弃小数部分,不四舍五入)
- 数值范围:32 位整数(-2147483648 到 2147483647)
- 负数处理:使用 32 位补码形式表示
- 输出格式:固定 8 位十六进制字符串(大写,不足 8 位前面补零)
示例:
// 示例1:正数转换
R[1] = 255
CALL_SERVICE CM, DecToHex, R_ID=1, SR_ID=1
// 结果:SR[1] = "000000FF"
// 示例2:浮点数截断
R[1] = 255.99
CALL_SERVICE CM, DecToHex, R_ID=1, SR_ID=1
// 结果:SR[1] = "000000FF"(截断为255)
// 示例3:负数转换(32位补码)
R[1] = -1
CALL_SERVICE CM, DecToHex, R_ID=1, SR_ID=1
// 结果:SR[1] = "FFFFFFFF"
// 示例4:负数转换
R[1] = -255
CALL_SERVICE CM, DecToHex, R_ID=1, SR_ID=1
// 结果:SR[1] = "FFFFFF01"
// 示例5:零值
R[1] = 0
CALL_SERVICE CM, DecToHex, R_ID=1, SR_ID=1
// 结果:SR[1] = "00000000"注意事项:
- R 寄存器中的浮点数会被截断为整数(不四舍五入)
- 数值必须在 32 位整数范围内(-2147483648 到 2147483647)
- 负数使用 32 位补码形式表示
- 输出始终为 8 位大写十六进制字符串,不足 8 位前面补零
12. TurnCountToR - 将 PR 位姿回转数写入 R 寄存器(单轴)
读取指定 PR_ID 寄存器中的 turnCircle (回转数),并只写入一个指定轴( Joint_ID )到 R[R_ID] 。
参数:
PR_ID(int): PR 寄存器编号,读取其姿态中的turnCircleR_ID(int): R 寄存器编号(单个 R)Joint_ID(int): 需要写入的关节轴(1=J1, 2=J2, ..., 6=J6)
数据规则:
- 仅允许写入值
-1 / 0 / 1 - 只替换指定轴的回转标记,不涉及其它轴
示例:
CALL_SERVICE CM, TurnCountToR, PR_ID=10, R_ID=100, Joint_ID=313. RToTurnCount - 将 R 寄存器回写到 PR 位姿回转数(单轴)
从 R[R_ID] 读取值,校验后只写回 PR_ID 的指定轴( Joint_ID )回转标记。
参数:
PR_ID(int): PR 寄存器编号,写入其姿态中的turnCircleR_ID(int): R 寄存器编号(单个 R)Joint_ID(int): 需要回写的关节轴(1=J1, 2=J2, ..., 6=J6)
数据规则:
- R 寄存器值必须为整数,且仅允许
-1 / 0 / 1 - 只替换指定轴,其它轴保持不变
示例:
CALL_SERVICE CM, RToTurnCount, PR_ID=10, R_ID=100, Joint_ID=3关键项
核心特性
- ** 长连接机制:** 自动管理机器人连接,首次调用时自动连接,已连接时复用现有连接
- ** 自动寄存器创建:**Strp 指令支持自动创建 R 寄存器(如果不存在),PR 寄存器需要手动创建
- ** 数据验证:** 所有指令都包含完整的参数验证和错误处理
- ** 精度控制:** 坐标系参数值自动保留三位小数
- ** 分隔符自动检测:**Strp 指令支持自动检测多种分隔符(逗号、分号、竖线、制表符、空格等)
- ** 回转数同步:** 支持 PR
turnCircle与 R 寄存器双向同步(TurnCountToR/RToTurnCount,单轴替换)
使用方法
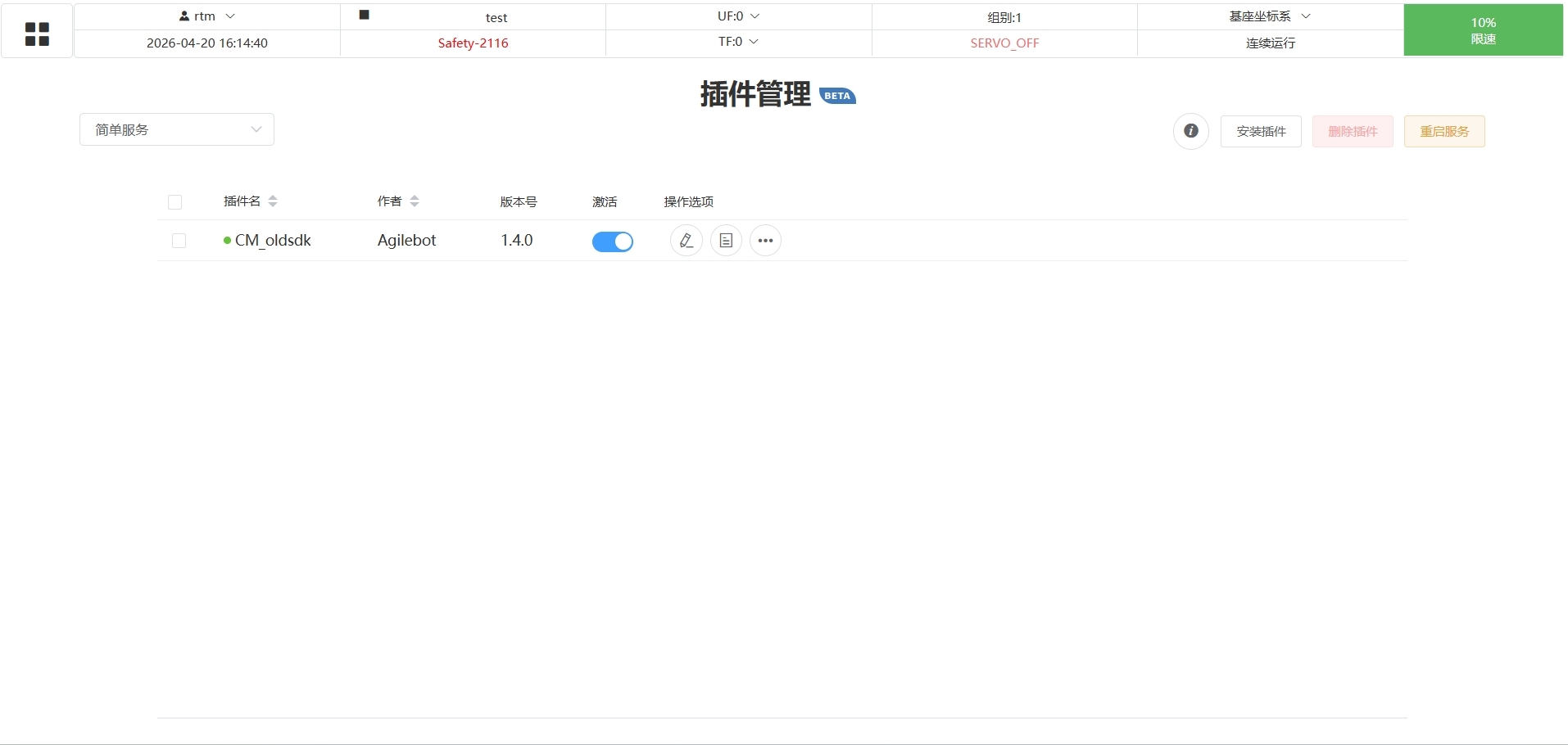
- 打开 应用 - 插件管理 ,点击右上角的 安装插件 按钮。

- 安装 CM_oldsdk.gbtapp
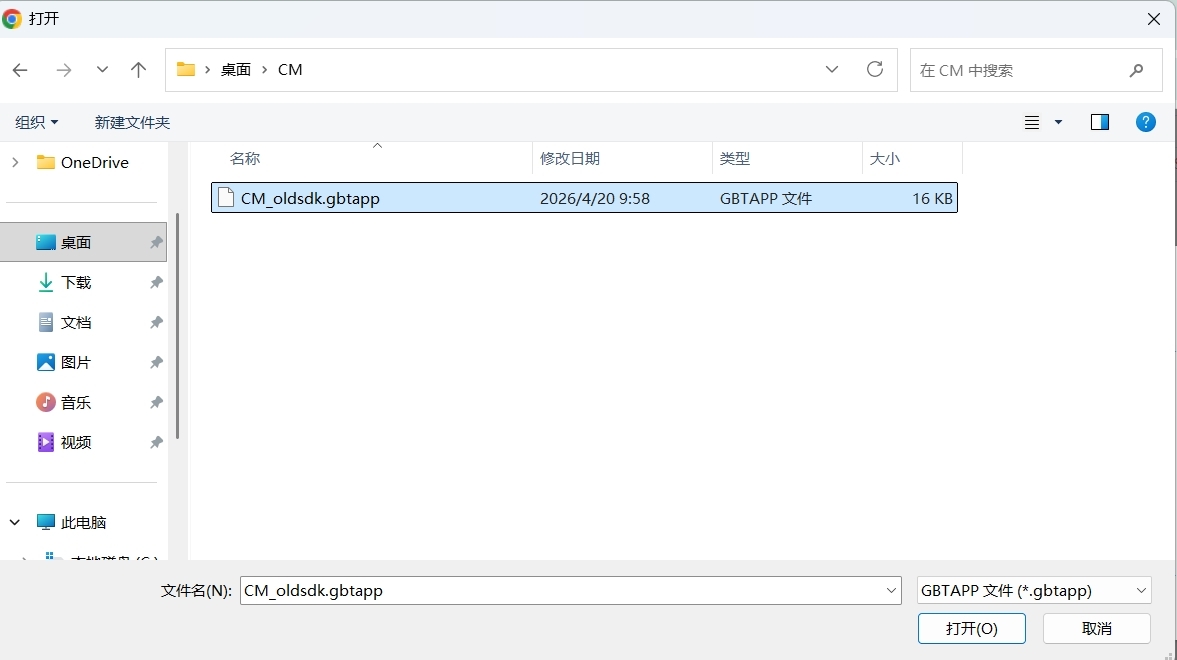
- 在 简单服务 类别中启用 CM_oldsdk.gbtapp
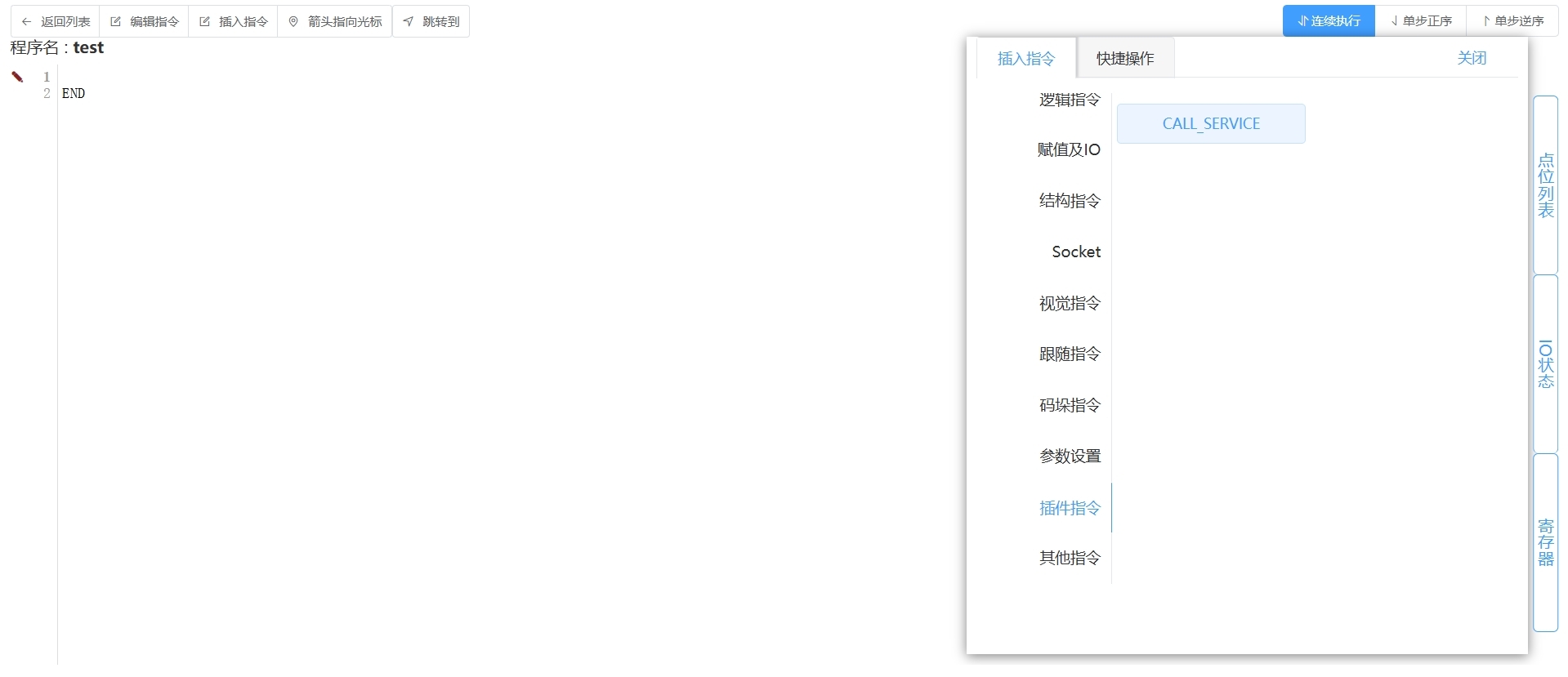
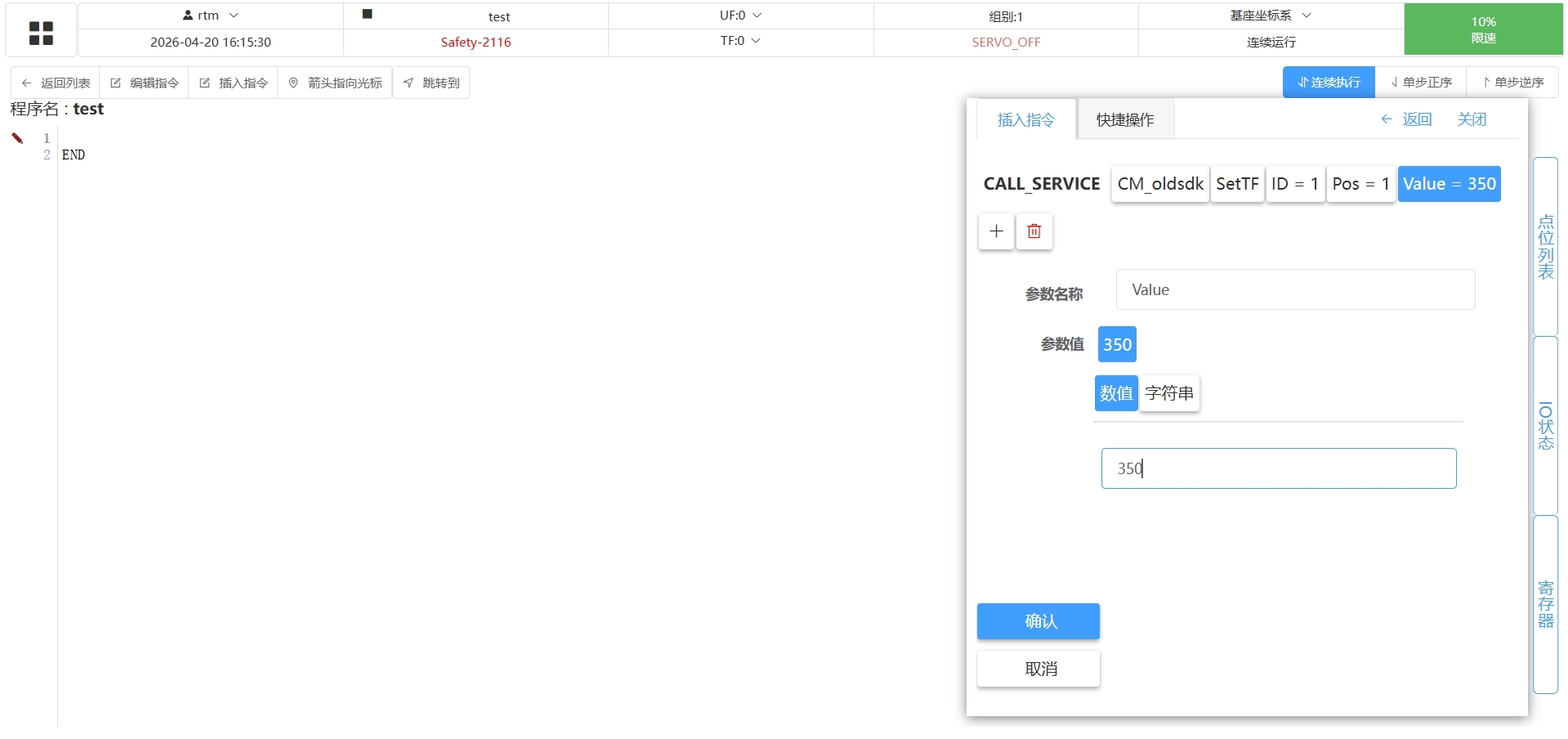
- 在建好的程序 test 里面插入插件指令,这里以更改 TF1 的 X 值举例,运行程序,可以看到 TF 的 X 值已被更改,其他的指令参照 readme。

注意事项
重要提示
- ** 坐标系 ID 范围:**ID 必须在 1-30 之间,0 是基础坐标系不可修改
- ** 参数编号:** 位置参数编号必须在 1-6 之间(1=X, 2=Y, 3=Z, 4=A, 5=B, 6=C)
- ** 寄存器存在性:** 使用 R 寄存器或 PR 寄存器前,建议确保寄存器已创建(Strp 指令支持自动创建 R 寄存器)
- ** 连接状态:** 确保机器人已正确连接且可访问,插件会自动管理连接
- ** 数据类型:** 所有数值参数会自动进行类型转换和验证
- Strp 指令特殊说明:
- PR 寄存器需要手动创建,使用前请确保 PR 寄存器已存在
- R_ID_Status 和 R_ID_Error 寄存器如果不存在会自动创建
- 状态位为 0 时,不会进行数据拆解,直接返回错误(R_ID_Status=0, R_ID_Error=1)
- 写入 PR 寄存器后会立即验证数据是否正确写入
- 建议在使用前检查 R_ID_Status 和 R_ID_Error 的值来判断执行结果
- ** 错误处理:** 所有指令返回字典格式,包含 success、message/error 字段,建议始终检查 success 字段
- 回转数约束:
TurnCountToR与RToTurnCount仅支持-1/0/1,用于轴回转标记同步
版本历史
V1.4 (2026 年 3 月 25 日)
- 新增 TurnCountToR 指令:将 PR 寄存器中的回转数(turnCircle)写入 R 寄存器
- 新增 RToTurnCount 指令:将 R 寄存器中的回转数回写到 PR 寄存器
- 增强回转数数据校验:仅允许
-1/0/1 - 将 TurnCountToR / RToTurnCount 调整为 “单轴替换” 模式:每次只更新一个轴,新增
Joint_ID指定 J1~J6 - 回转数同步仍仅支持
-1/0/1
V1.3 (2026 年 1 月 12 日)
- 新增 DecToHex 指令:从十进制转换为十六进制
- 支持将 R 寄存器中的十进制数值转换为 32 位十六进制字符串
- 支持浮点数截断、负数补码转换
- 输出固定 8 位大写十六进制格式
V1.2 (2026 年 1 月 9 日)
- 新增 TFShift 指令:工具坐标系补正(基于视觉反馈)
- 支持通过视觉反馈自动计算和更新工具坐标系
- 提供高精度坐标变换计算,支持误差验证
V1.1 (2026 年 1 月 9 日)
- 新增 SDK v2.0.0.0 版本支持
- 更新坐标系接口:使用
coordinate_system.TF/UF子类 - 更新坐标系数据结构:使用
coordinate.data.x/y/z/a/b/c - 更新连接状态检查:
is_connect()→is_connected() - 更新错误处理:使用
ret.errmsg获取错误信息 - 更新 Extension 使用方式:支持独立实例化获取 IP 地址
CM 用户自定义指令插件 | 版本 V1.4 | 更新日期:2026 年 3 月 25 日 | © 2026