慧灵夹爪插件
1. 文档概述
1.1 文档目的
提供一份专业且全面的协作机器人夹爪插件使用文档,指导使用者正确的使用插件以满足实际调试现场要求。本文提供 GBT 机器人关于慧灵夹爪 Z-ERG-20C 的两个插件,分别可以在程序中使用简单服务定义的指令编程和通用服务中打开 UI 进行手动调试和配置夹爪相关参数。
1.2 适用产品与版本
夹爪品牌与型号:HITBOT_Z-ERG-20C
机器人品牌与型号:GBT - 协作机器人系列
机器人版本要求:V7.6.D.1 及以上,末端版本 2542 及以上
插件版本号:
简单服务插件:HL-20251205
通用服务插件:HLUI-20251205
1.3 相关文档
夹爪相关手册:https://www.hitbot.cc/
机器人相关手册:https://www.sh-agilebot.com/
2. 用前需知
2.1 注意事项与更新记录
更新日期:2025/12/5
更新内容:初版发布
①
当前该插件仅支持波特率 115200,数据位 8,停止位 1,校验方式无,请提前在 hitbot 上位机软件配置。
如有特殊要求请联系开发人员,后续增加自定义通讯参数配置
②
指令异常暂无自定义日志信息,只会报警远程服务调用超时

2.2 安全相关
通用安全规范
操作前必须接受培训。
在自动运行前务必进行手动测试。
工作区域内确保安全。
安装与调试警告
断电后进行电气连接。
确保夹爪安装牢固,负载(工件)在夹爪承受能力范围内。
注意夹爪运动范围,避免与机器人本体或周围环境发生碰撞。
操作期间警告
切勿在夹爪夹持物体时将手或身体部位伸入夹爪操作区域。
急停按钮在合理范围内。
3. 系统要求与准备工作
3.1 硬件要求
协作机器人控制器可正常开机使用。
夹爪本体可正常上电使用。
必要的线缆(通讯线、电源线)。(目前仅支持末端 io 使用,如需接入控制柜使用请联系开发人员)
安装法兰或适配板。
3.2 软件要求
机器人操作系统版本正常可以使用。
机器人支持插件环境和插件安装。
其它:见 1.2 适用产品与版本
4. 安装与配置
4.1 插件安装
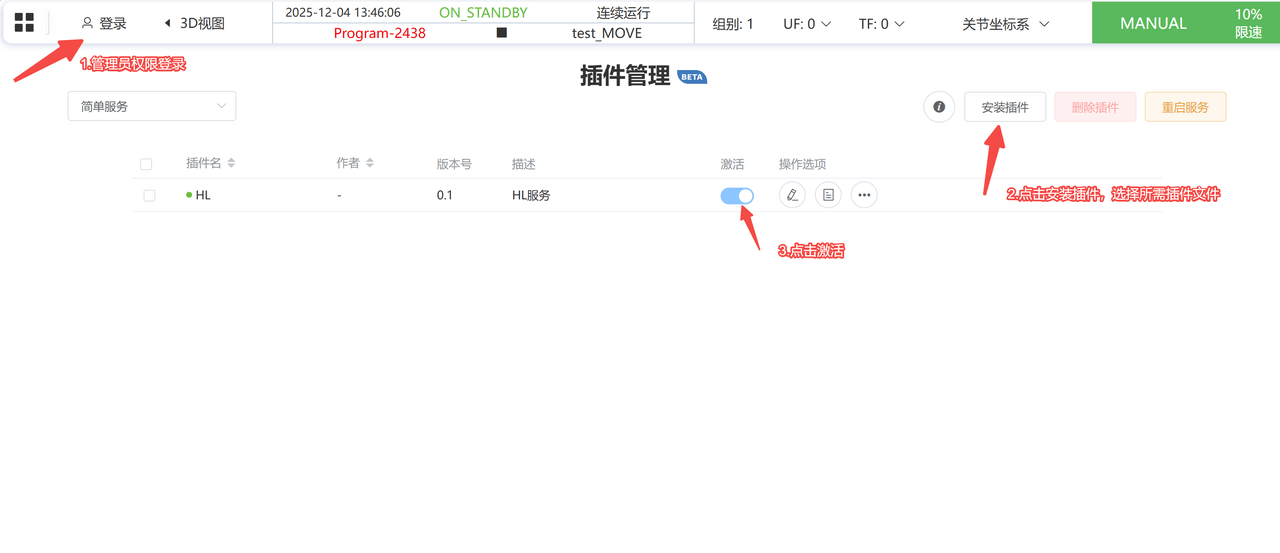
注意:应 在夹爪硬件接线成功且末端 io 配置成功后再激活插件使用
4.2 硬件安装与连接
机械安装:
按照实际需求连接机器人夹爪至机器人法兰连接件,机器人法兰接口尺寸查看对应型号本体机械说明书
电气连接:
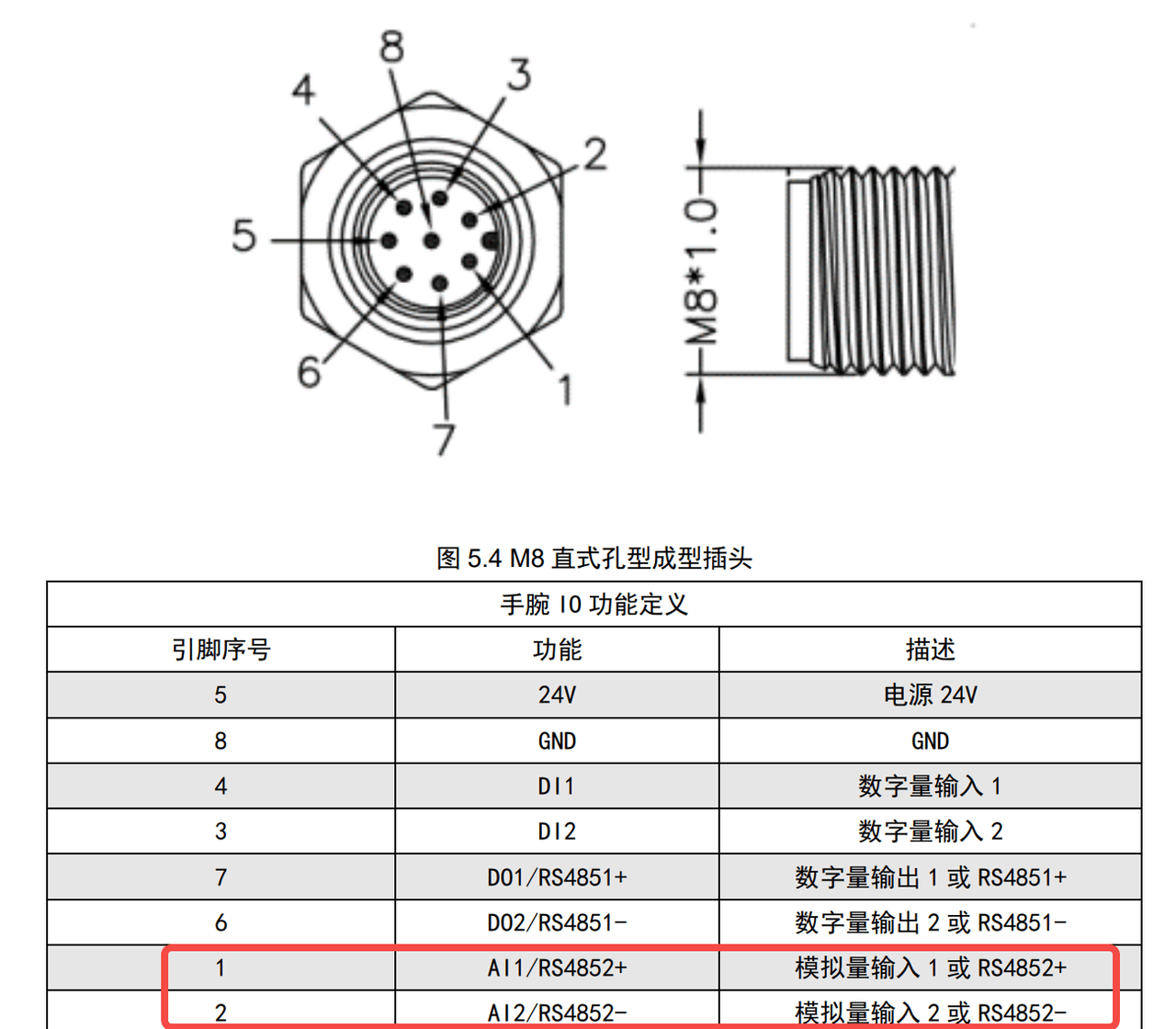
接线图
电源连接:
采用机器人末端 io 供电 24v
请选择下图:引脚 5 供 24v, 引脚 8 供电 0V,并 查看 4.3 如何在机器人软件配置
通讯连接:
采用机器人末端 485 通讯,
请选择下图:引脚 1 和引脚 2 接线并查看 4.3 如何在机器人软件配置
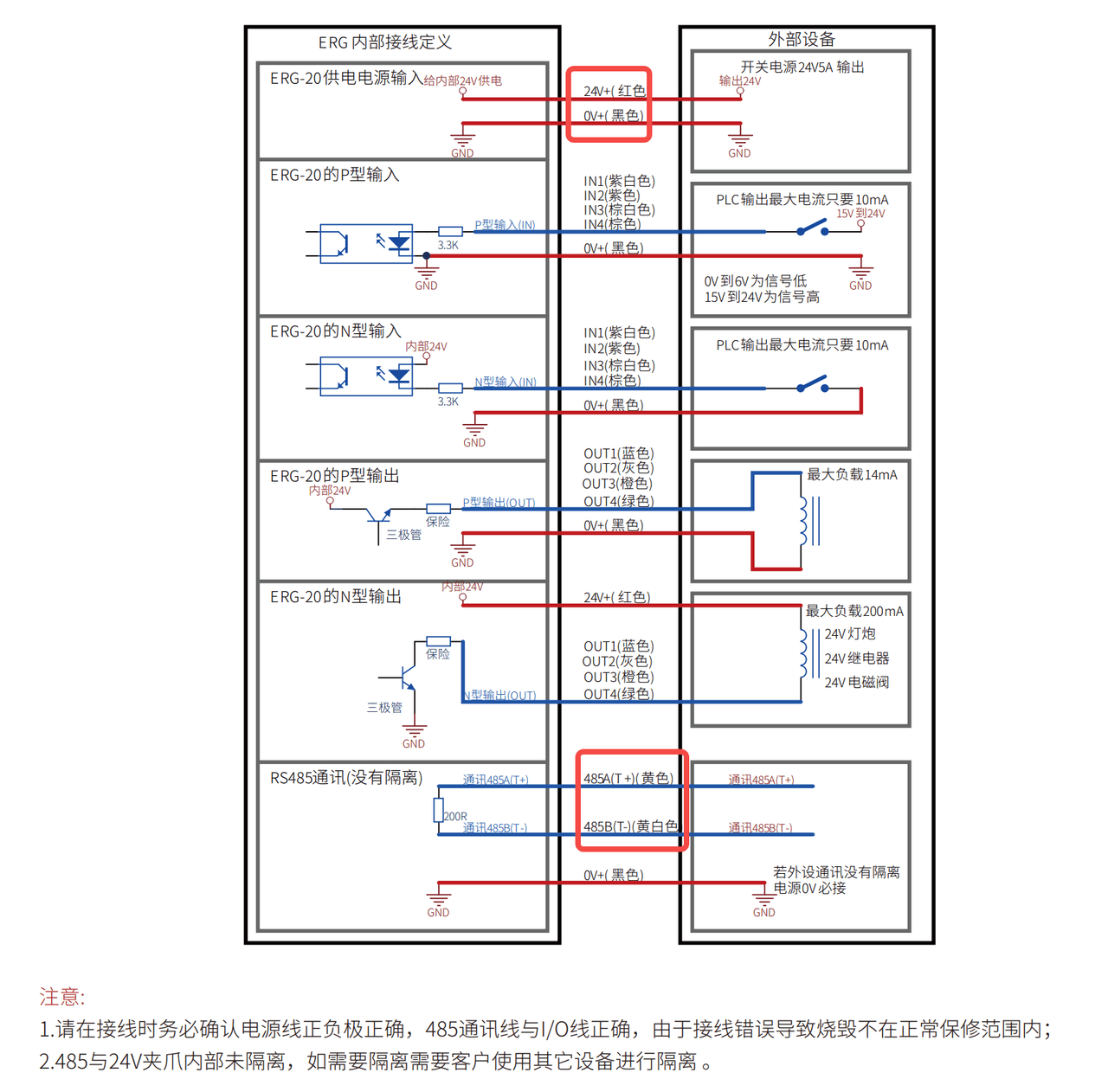
夹爪接口:
请选择红色 24V + 与上述引脚 5 接线
选择黑色 0V + 与上述引脚 8 接线
选择黄色 485a 与上述引脚 1 接线
选择黄白色 485b 与上述引脚 2 接线
注意 485 与 24v 夹爪内部未隔离,如有需要需客户使用其它设备进行隔离,夹爪部分详细使用请联系 HITBOT 技术支持
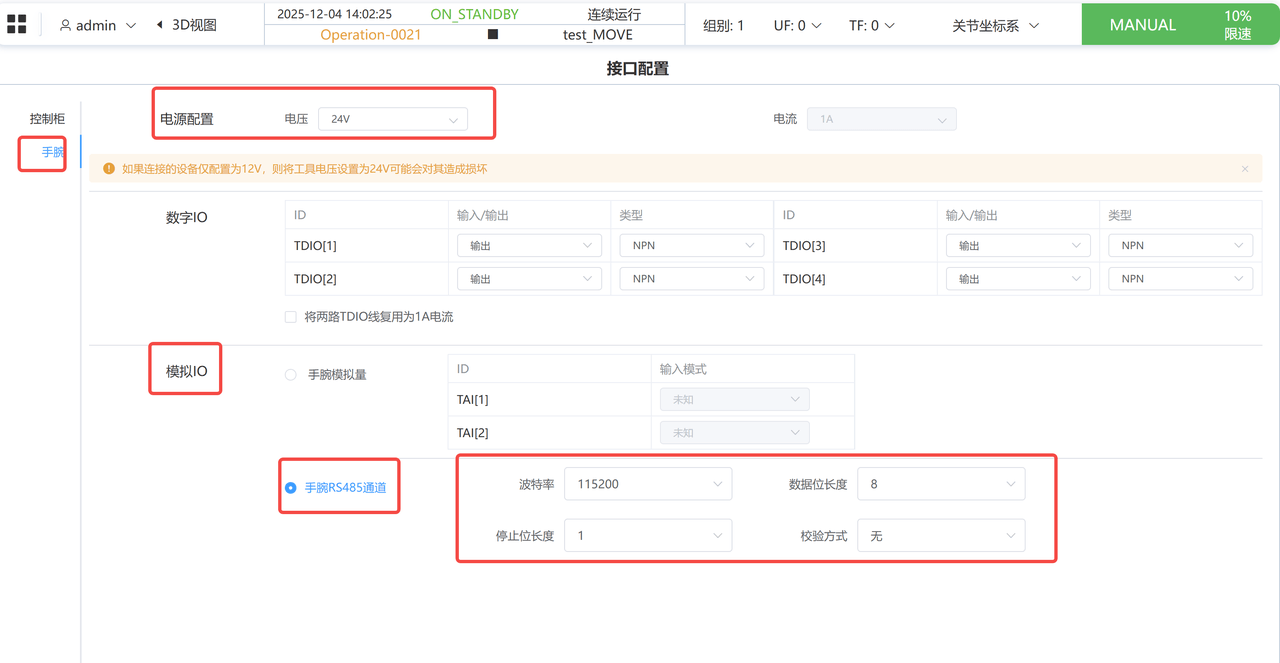
4.3 软件配置
登录机器人 TP 并成功连接至机器人
点击通讯 -- 接口配置 -- 手腕,配置相关通讯参数 (建议使用默认参数:115200,8,1,N)。
5. 功能使用指南
5.1 通用服务插件
功能:
手动调试夹爪张开闭合、旋转
查看夹爪当前状态
修改夹爪参数
使用说明:
1. 激活插件
激活插件成功后插件名称左边会出现绿点表示插件激活成功,如果为出现则检查当前版本是否支持或联系技术支持人员

2. 通用服务插件 - UI 界面
可点击菜单 -- 应用 -- 插件,选择对应插件进入

如果出现下图页面则表示插件未连接至夹爪,请检查接线和配置
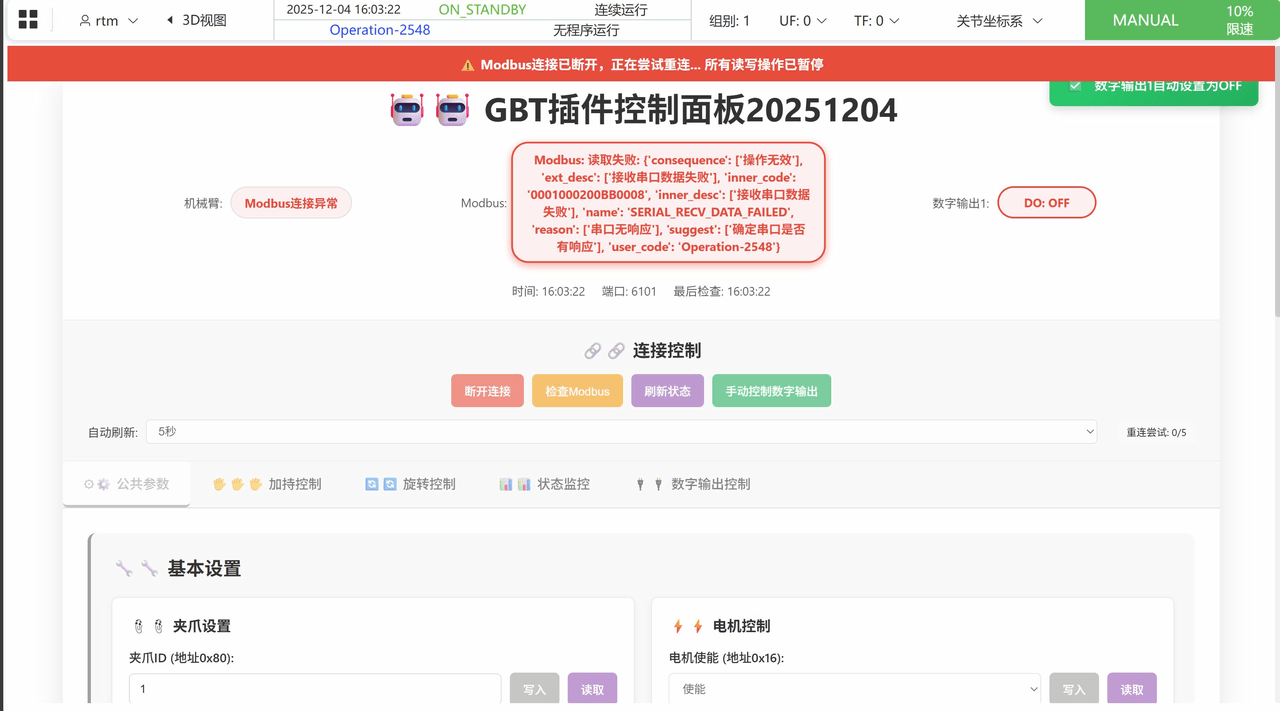
连接成功会出现下述页面
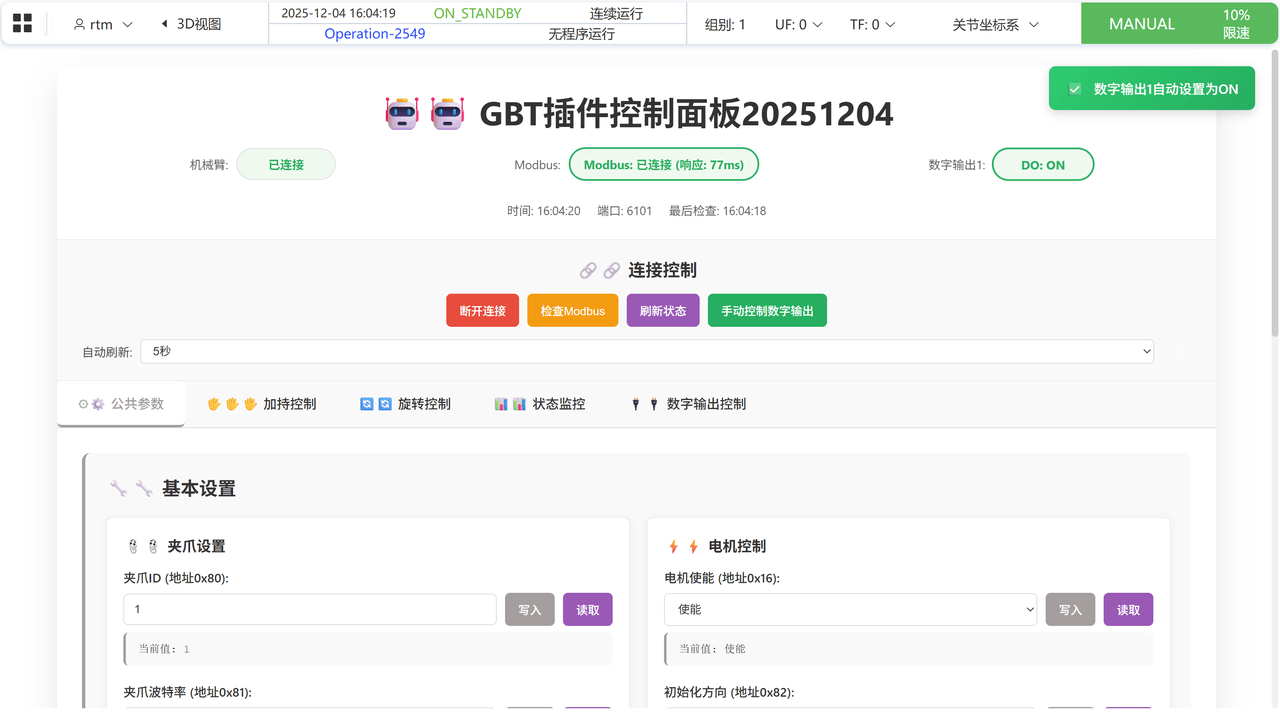
解释:
3.1 公共区域部分:
插件使用 sdk 连接控制器内部,该状态表示成功连接,如果出现连接异常请检查当前版本是否支持或联系技术人员

该状态通过读取从站寄存器信息检查 modbus 连接状态,并映射至数字输出状态,可供外部设备检查夹爪连接状态,连接正常为 1,失败为 0,配置信息可以在界面 “数字输出控制” 选择,默认地址数字输出 1

该栏目可以手动断开 modbu 和 sdk 连接,刷新页面状态,和手动控制连接状态的数字输出
页面的自动刷新指的是页面定期(例如每 5 秒)自动向服务器请求最新数据并更新页面显示,而不需要用户手动点击刷新按钮。
3.2 公共参数部分
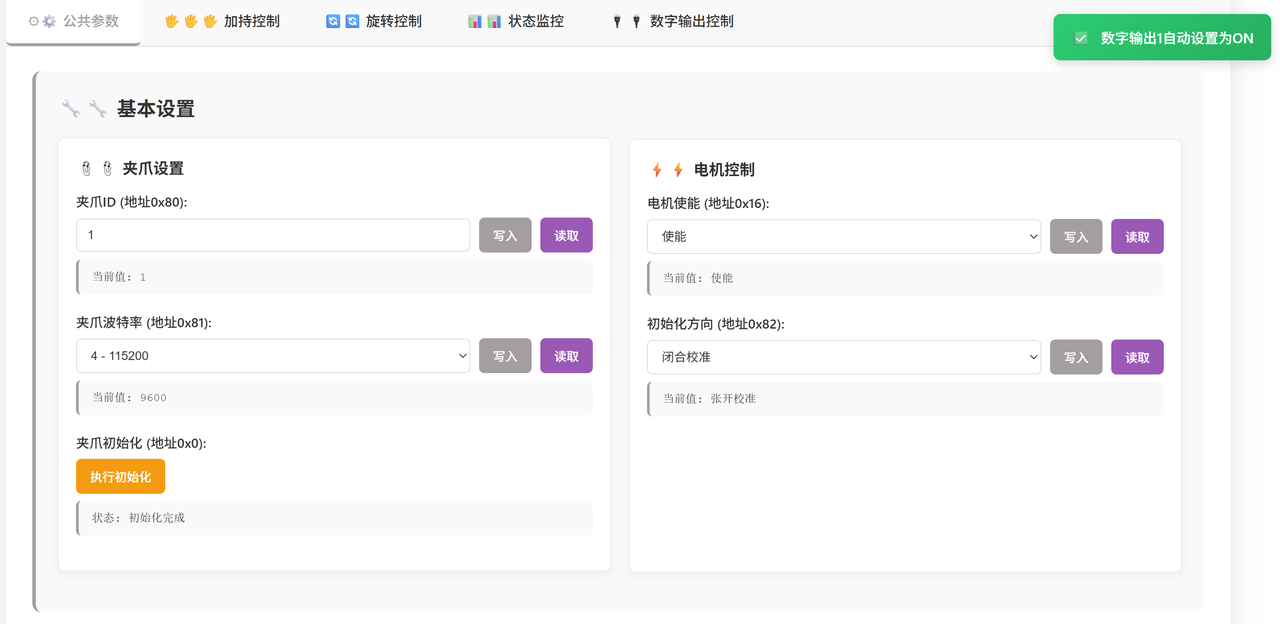
可以配置夹爪:
ID
波特率(目前只支持 115200)
电机使能状态
初始化方向
手动执行初始化
3.3 高级设置
可以配置夹爪:
- 上电是否自动初始化
保存参数
包含:ID, 波特率,初始化方向,自动初始化设置,旋转堵停使能,旋转堵停灵敏度
且需要断电重启后生效
旋转堵停使能设置
旋转堵停灵敏度是指在堵转停转使能的情况下(夹爪旋转堵转后会停止旋转)
旋转堵停灵敏度
夹爪停转时的灵敏度要求,取值范围为 0-100,例如设定值为 100,则夹爪在旋转过程中碰到障碍,会在较 高的速度下停止旋转,保护夹爪和所夹取的产品,相对来说比较灵敏,若设定值为 10,则是旋转时碰到障碍,旋转速度降到更低时,才会触发夹爪的停转;
复位多圈转动值
复位多圈转动值是指夹爪在旋转多圈后,将当前位置的多圈数值清除的方法,比如当前夹爪的旋转角度是 760°(2*360°+40°),清除多圈后,旋转角度就变为 40°(减去整数圈的度数 720°),当前旋转角度为 - 600° (-360°-240°),清除多圈后,旋转角度变为 - 240°(减去整数圈的度数 - 360°),非必要不建议使用
其它相关设置请使用 HITBOT 上位机软件连接夹爪设置

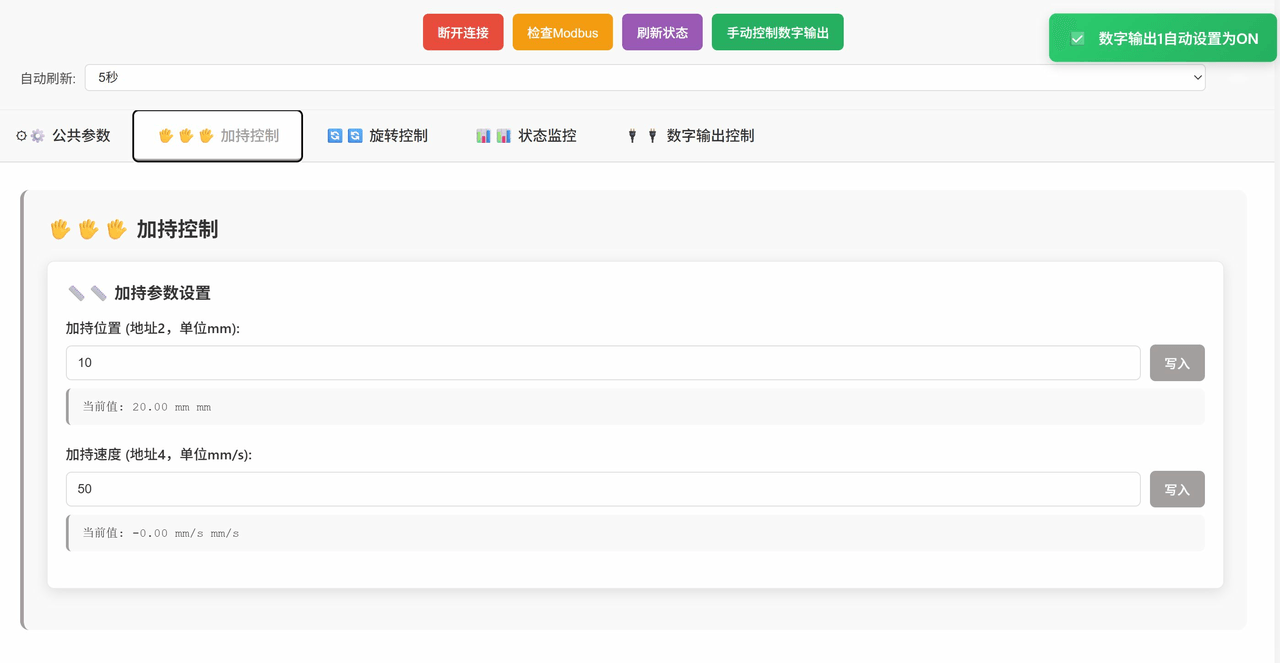
3.4 夹持控制
可以设置:
夹持位置
单位 mm,范围 0-20,点击写入夹爪加持
夹持速度
单位 mm/s,范围 1-100,点击写入修改速度,如果当前夹爪正在运动则写入速度不会立即生效
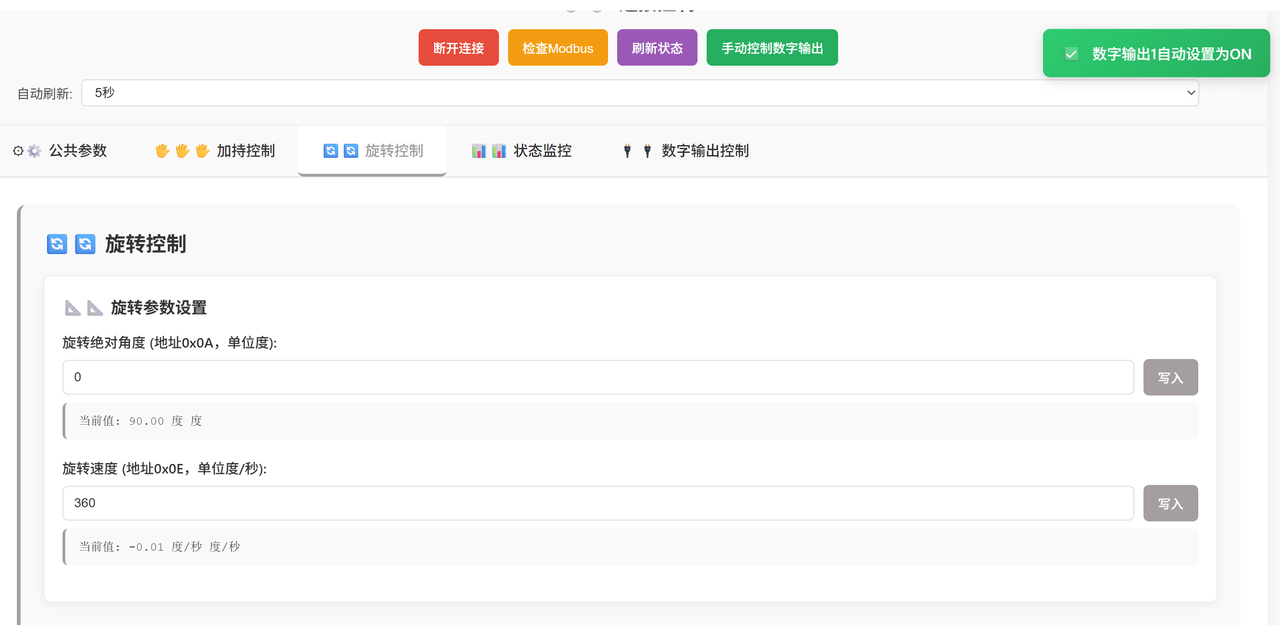
3.5 旋转控制
可以设置:
- 绝对旋转角度
单位度,范围 - 3600000 至 3600000
- 旋转速度
单位度 / 秒,范围 1-1080,点击写入修改速度,如果当前夹爪正在运动则写入速度不会立即生效
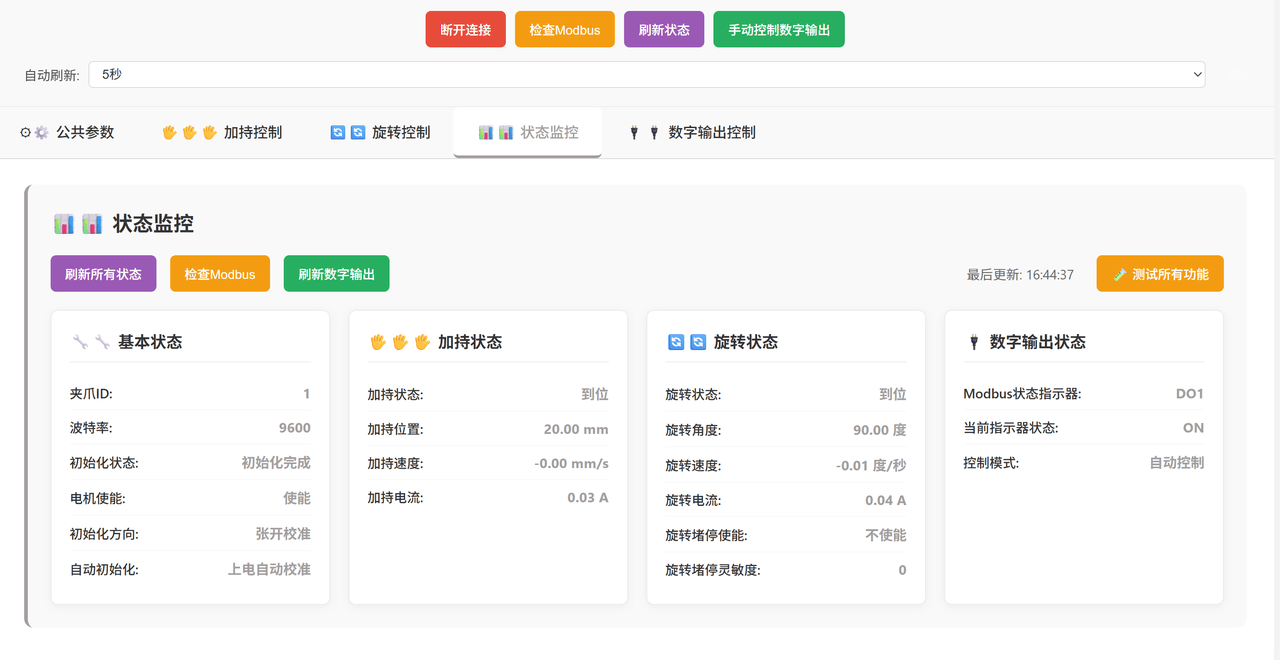
3.6 状态监控
该页面可以监控已添加的所有参数信息
注意如果在其它页面想读取信息,需要先点击该处的 “刷新所有状态”
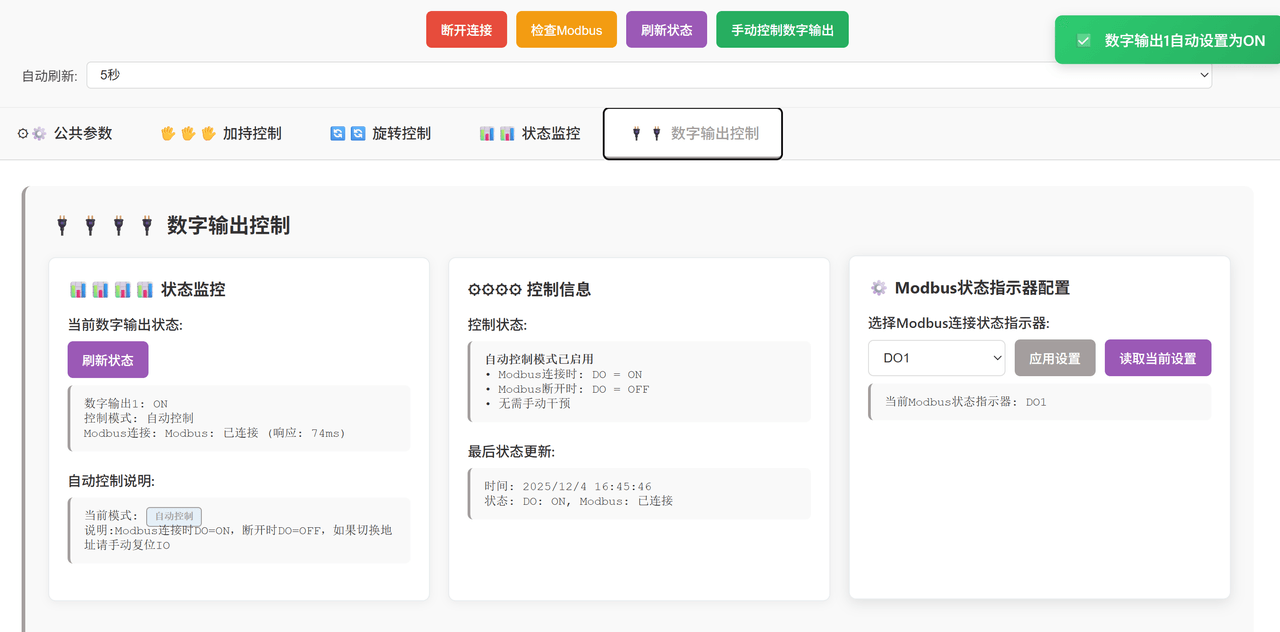
3.7 数字输出控制
该页面可以配置将数字输出 1-16 中任意一个信号点映射为夹爪连接状态,理论误差小于 1 秒
注意关闭插件运行状态属于人工干预,数字输出状态并不会复位!
5.2 简单服务插件 - 程序指令
功能:
在程序中可以连接 / 断开夹爪,控制夹爪运动,等待夹爪到位
使用说明:
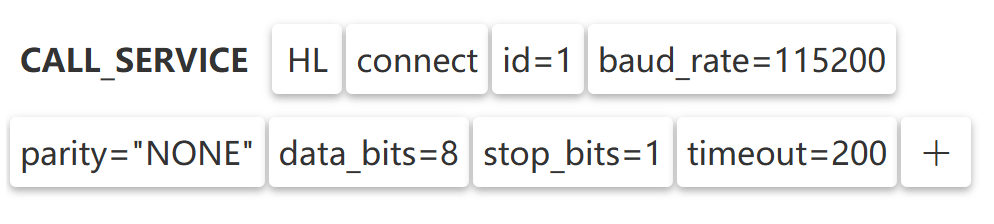
1. 连接与断开夹爪
可选参数:id, 波特率,奇偶校验,数据位,停止位,超时时间
2. 控制夹爪开合和速度
可选参数:id, 位置 0-20mm,速度 1-100mm/s

3. 控制夹爪旋转和速度
可选参数:id, 绝对旋转角度:-3600000~3600000°,旋转速度:1-1080°/s

4. 等待夹爪开合到位
可选参数:id, 目标位置 mm,容许偏差 mm, 超时时间 ms(需要小于 800ms),采样间隔 s

5. 等待夹爪旋转到位
可选参数:id,目标角度 °,容许偏差 mm, 超时时间 ms(需要小于 800ms),采样间隔 s

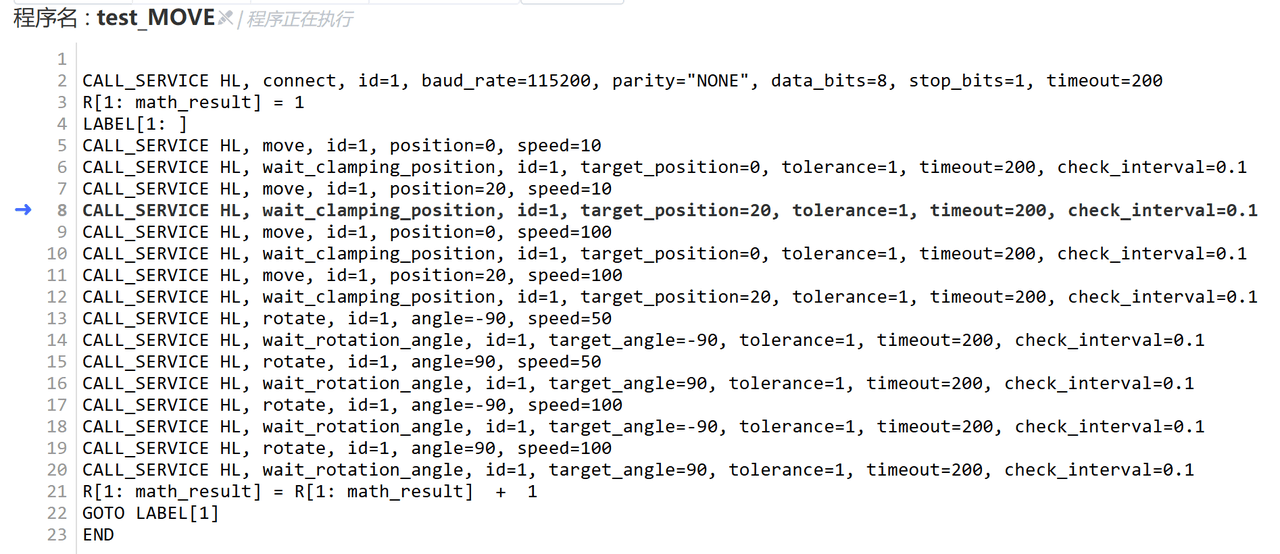
程序示例:
6. 维护与故障排除
6.1 日常维护
清洁、检查等建议。
6.2 常见问题与解决方案(FAQ)
现象:插件无法连接夹爪。
可能原因:线缆松动、地址错误、电源未开启。
解决方案:检查物理连接,确认配置参数。
6.3 错误代码说明
  联系技术支持人员
7. 附录
7.1 技术规格
夹爪的详细技术参数,请查看 1.3 相关文档
插件的技术参数,请查看 5 功能使用指南
7.2 免责声明
本插件及相关文档均按 “现状” 提供,不附带任何明示或暗示的保证,包括但不限于对商品适销性、特定用途适用性以及不侵犯第三方权利的暗示保证。开发商不保证本插件完全无缺陷或错误,也不保证其操作不会中断。
在任何情况下,开发商及其关联方均不对因使用或无法使用本插件而导致的任何直接、间接、附带、特殊、惩罚性或后果性损失承担责任,包括但不限于:
数据丢失或损坏。
生产中断或利润损失。
业务中断。
设备损坏或人身伤害。
任何第三方提出的索赔。
任何对本插件的未经授权的修改、反向工程、反编译或反汇编均被严格禁止。因用户或第三方对插件进行的任何未授权改动而导致的任何问题,开发商概不负责。
用户有责任确保在使用本产品时,完全遵守其所在国家或地区的所有适用的安全标准、法律、法规,包括但不限于机械指令、电气安全法规、职业健康与安全规定等。开发商提供的安全信息仅为一般性指导,不能替代用户根据其具体应用场景进行的全面风险评估