TCP 速度
功能概述
TcpVelocity 插件围绕机器人的 TCP 末端速度提供一套端到端的监控和配置体验。它包含一个通用服务(前端 + 后端)和一个可以在用户程序中被 CALL_SERVICE 指令调用的简单服务,核心能力如下:
- 实时状态显示: 在界面上显示机器人的实时运行状态、TCP 速度以及当前执行的程序名称。
- 指令调用: 支持在用户程序中通过
CALL_SERVICE指令,指定用于写入 TCP 速度的 R 寄存器索引。 - 多语言适配: 插件界面语言自动跟随系统语言切换。
- 日志持久化: 通用服务使用日志模块实现日志持久化。
- 插件示例: 提供可直接运行的 demo 工程,便于快速理解服务协作方式。
界面交互展示
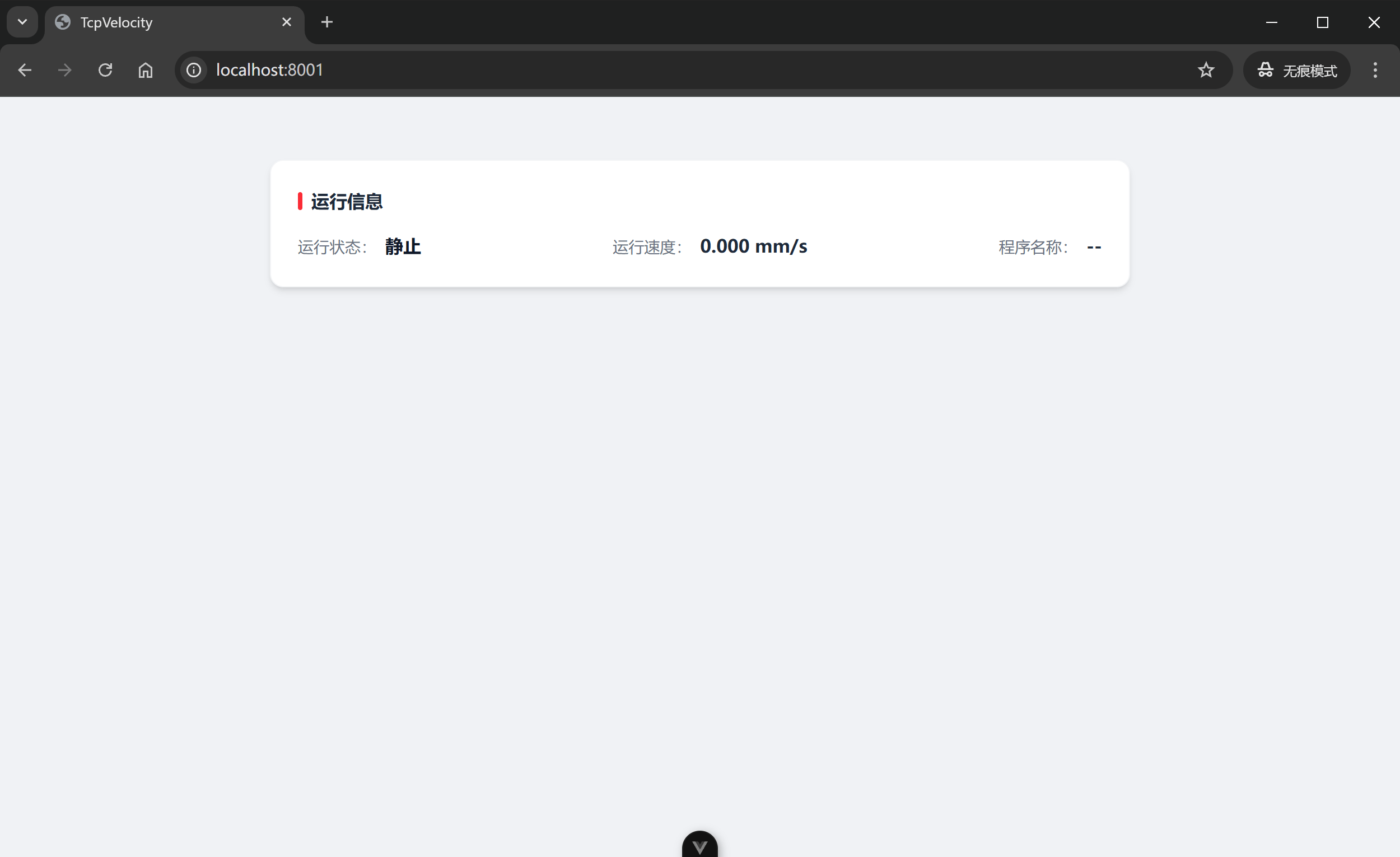
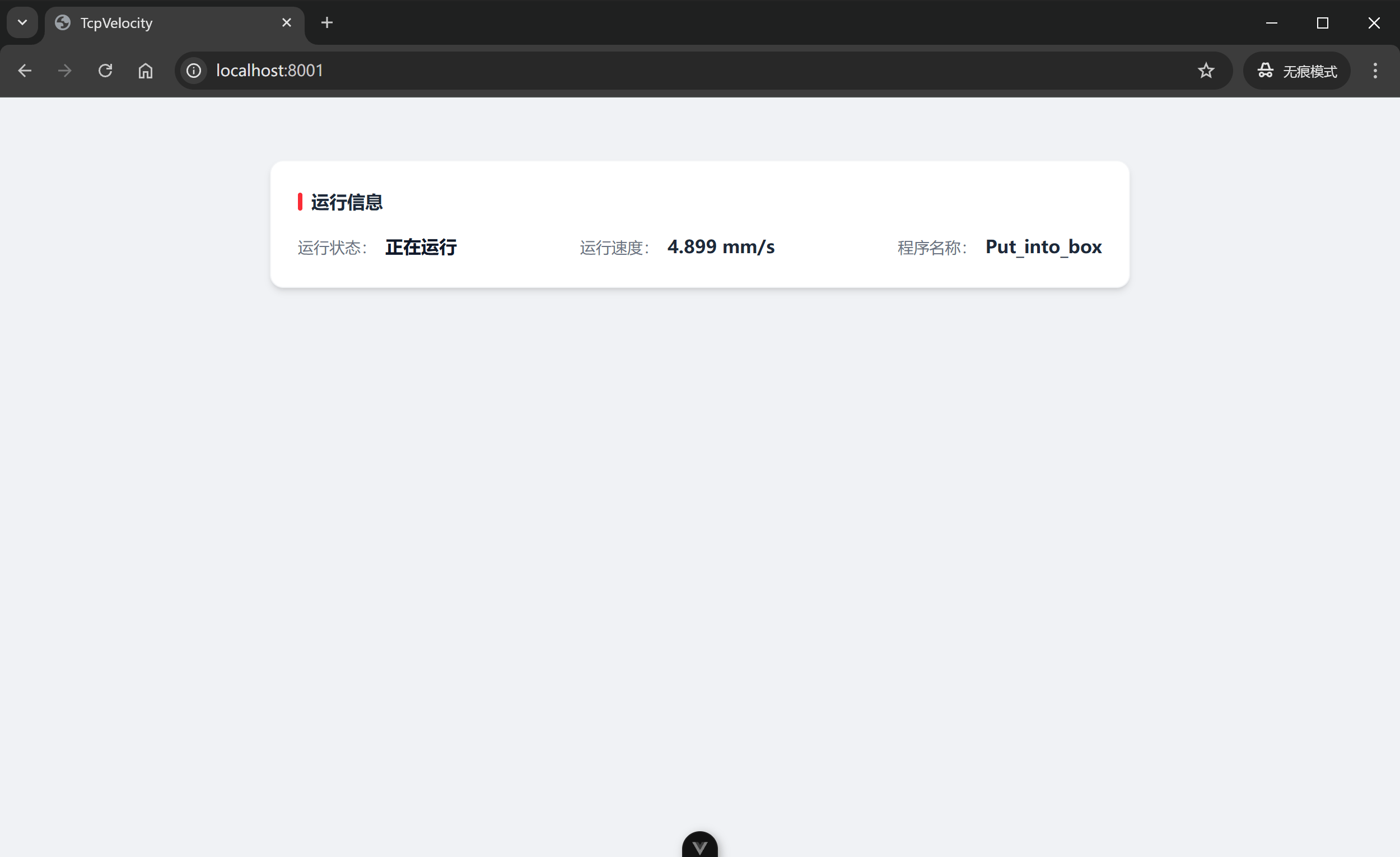
布局概览
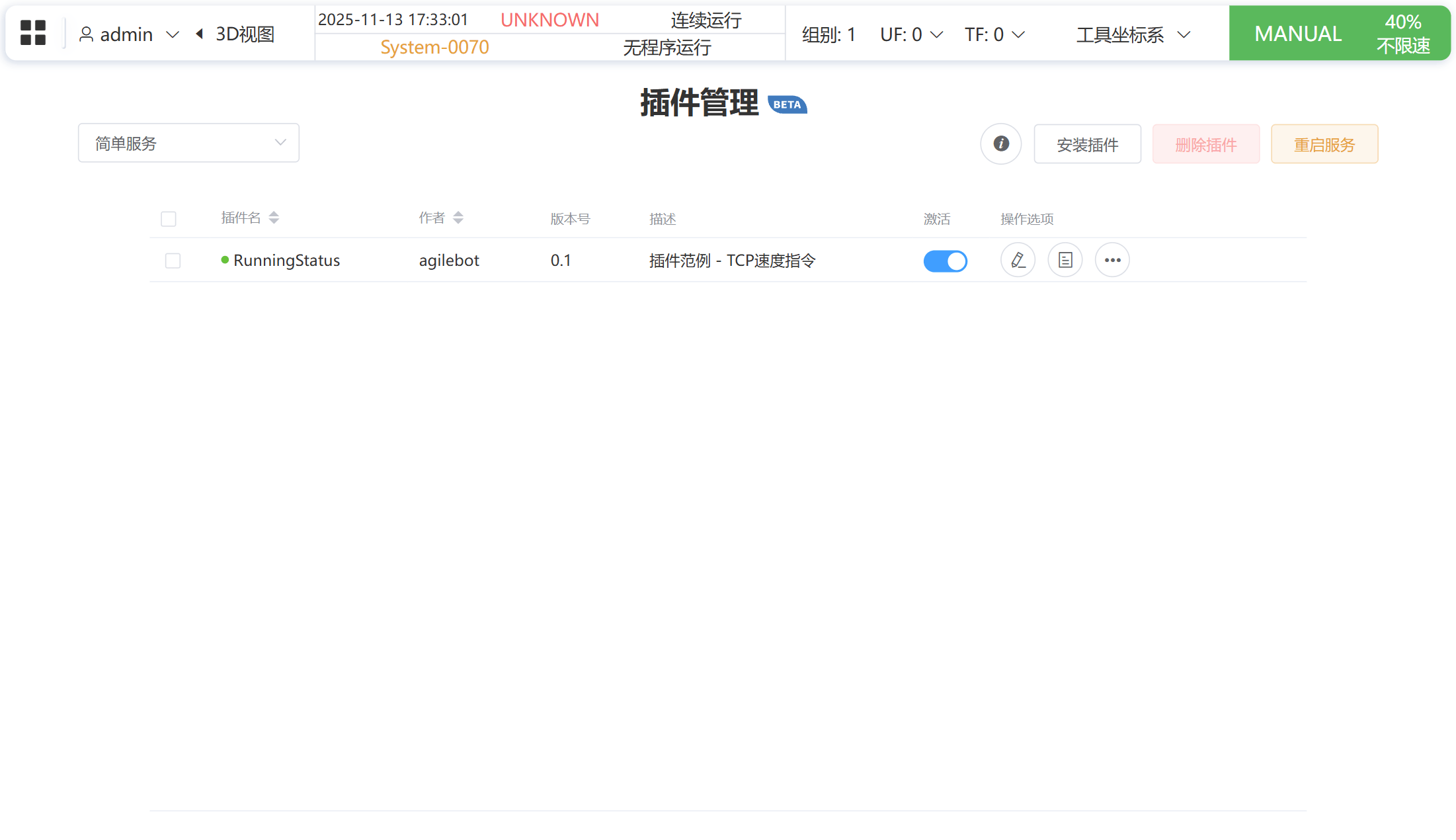
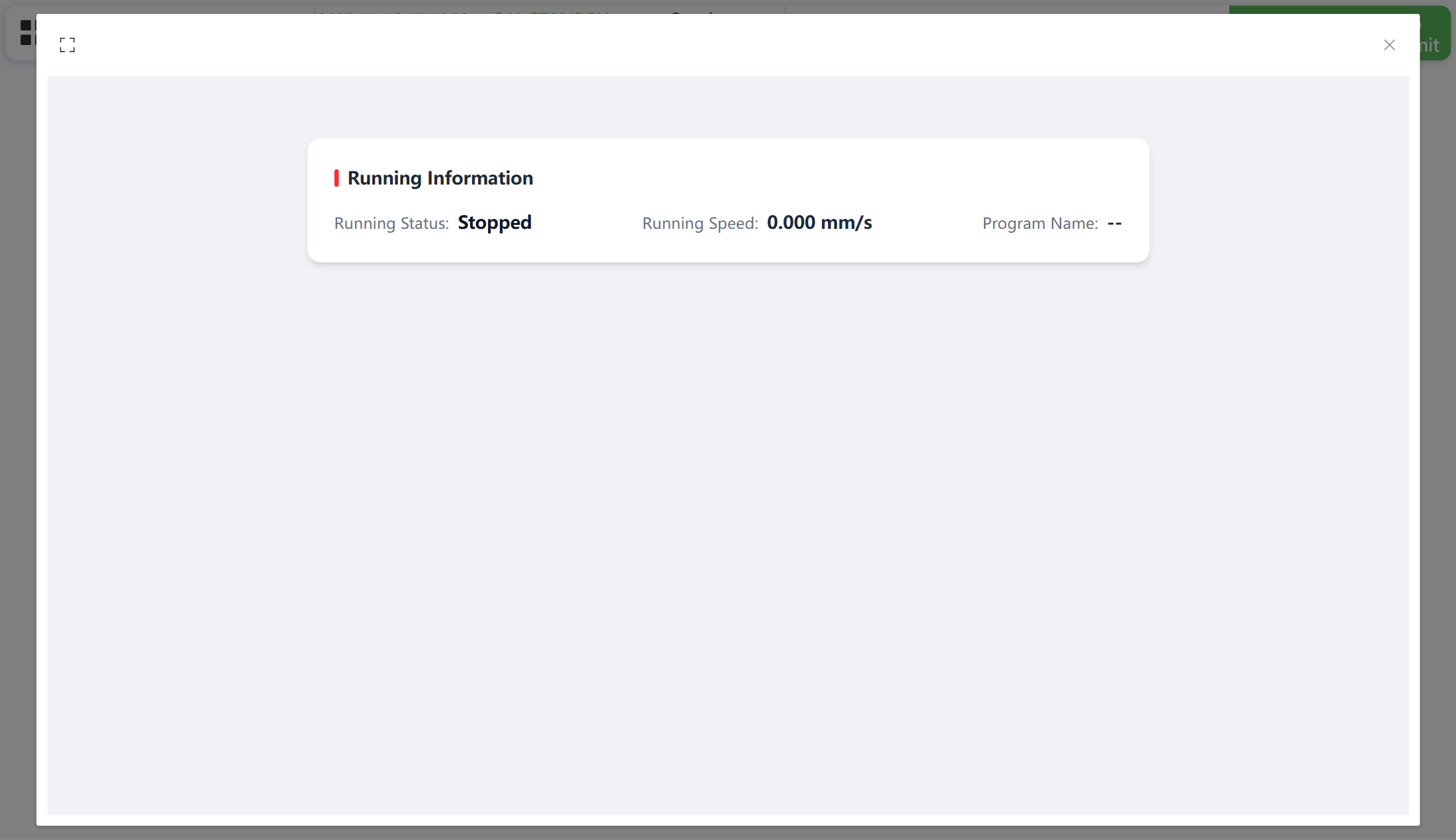
下图展示插件主界面布局及 TCP 速度的实时更新效果:
指令调用效果
通过 CALL_SERVICE 指令调用插件,可指定将 TCP 速度写入特定的 R 寄存器(如下图所示):
多语言适配
切换系统语言后,插件界面会自动跟随系统语言切换(如下为英文模式):
需要的基础知识和基础工具
技术储备
- 熟悉 Node.js 及包管理工具(pnpm),用于安装与调试通用服务前端。
- 了解 Python 虚拟环境配置与 Agilebot Python SDK。
- 具备基础 Web 前端开发经验(HTML/CSS/JavaScript)以及 Vue 框架使用经验。
基础工具与运行环境
- 确保电脑与机器人处于同一局域网。
- 机器人系统版本需要 >= Copper 7.7.3。
- 已安装 Agilebot Python SDK(>= 2.0.0.0),参考 SDK 安装文档。
- 浏览器(Chrome/Edge 最新版)。
软件文件结构
从插件开发工具包仓库的 "demo" 目录下载示例代码后,目录结构如下:
- TCP速度
- RunningStatus
- config.json
- RunningStatus.py
- TcpVelocity
- app
- assets
- main.css
- i18n
- App.vue
- main.ts
- assets
- server
- base_server.py
- config.py
- ipc_utils.py
- logger.py
- models.py
- robot_services.py
- robot_worker.py
- state.py
- config.json
- main.py
- package.json
- requirements.txt
- app
- RunningStatus
各目录职责如下:
RunningStatus:简单服务,接收CALL_SERVICE指令后调用TcpVelocity,写入目标 R 寄存器编号。RunningStatus/config.json:简单服务的元信息和入口声明。
TcpVelocity:通用服务,提供 FastAPI + WebSocket 接口,server/robot_services.py处理机器人数据并写入 R。TcpVelocity/app:Vue 前端,订阅 WebSocket 展示速度与程序状态。TcpVelocity/server:与机器人通信、IPC、日志等后端实现。TcpVelocity/config.json:通用服务的元数据与入口声明。
核心交互流程
与机器人系统的交互
通用服务 TcpVelocity 通过 Agilebot Python SDK 同机器人建立 sub_pub 连接,订阅笛卡尔位姿与 TP 程序状态。
await self.arm.sub_pub.connect()
await self.arm.sub_pub.subscribe_status(
[
RobotTopicType.CARTESIAN_POSITION,
RobotTopicType.TP_PROGRAM_STATUS,
],
frequency=200,
)
await self.arm.sub_pub.start_receiving(self.handle_robot_message)收到位姿后,后端会计算 TCP 速度,并在寄存器索引有效时写入到指定的 R 寄存器。
r_index = SharedState.get("tcp_velocity_r_index")
if r_index is not None and r_index > 0:
ret = self.arm.register.write_R(r_index, self._last_tcp_velocity)
if ret != StatusCodeEnum.OK:
logger.error(f"写入 R 寄存器失败: {ret.errmsg}")简单服务在收到 CALL_SERVICE 指令后,会查询 TcpVelocity 的运行端口,并向 /api/set_tcp_velocity_r_index 发送 HTTP 请求以设置目标寄存器编号。
extension = Extension(ROBOT_IP)
res, ret = extension.get("TcpVelocity")
if ret != StatusCodeEnum.OK or not res.state.isRunning:
raise Exception("TcpVelocity 服务未运行")
api_url = f"http://{ROBOT_IP}:{res.state.port}/api/set_tcp_velocity_r_index"
requests.post(api_url, json={"index": r_index}).json()组件间通信机制
TcpVelocity 涉及简单服务、通用服务后端、子进程采集器及前端应用,多种通信方式贯穿其中:
简单服务 → 通用服务(HTTP):
RunningStatus调用TcpVelocity服务的/api/set_tcp_velocity_r_index接口下发配置,TcpVelocity随即将该索引存入SharedState,供数据处理线程读取使用。
py@app.post("/api/set_tcp_velocity_r_index") async def set_tcp_velocity_r_index(body: SetTcpVelocityIndexRequest): SharedState.set("tcp_velocity_r_index", body.index) logger.info(f"设置 TCP 速度写入的 R 寄存器为: {body.index}") return {"result": True}FastAPI 主进程 ↔ 机器人订阅子进程(IPC):
- 服务启动时用
IPCManager派生robot_worker子进程采集机器人数据。 - 子进程通过队列回传消息,主进程
_ipc_handle负责广播并缓存速度。
pyipc = IPCManager( spawn_proc=lambda q: start_robot_process(ROBOT_IP, q), handler=_ipc_handle, log=logger, watch_interval=2.0, ) async def _ipc_handle(item): await ws_server.broadcast(item) if isinstance(item, dict) and item.get("type") == MessageType.TCP_VELOCITY: SharedState.set("last_tcp_velocity", float(item.get("velocity") or 0.0))- 服务启动时用
通用服务 → 前端页面(WebSocket):
- 前端
app/App.vue借助useWebSocket直接接入通用服务提供的 WebSocket,实时展示 TCP 速度与当前运行的 TP 程序名称。
tsconst { data } = useWebSocket('/ws', { autoReconnect: true, }) watch(data, (rawMsg) => { const msg = JSON.parse(rawMsg) if (msg.type === 'tcp_velocity') { velocityText.value = `${Number(msg.velocity).toFixed(3)} ${msg.unit || 'mm/s'}` } else if (msg.type === 'running_program') { programName.value = msg.program_name || '--' } })- 前端
开发指南
通用服务的开发
- 打开
PowerShell,进入TCP速度/TcpVelocity目录,执行pnpm i安装前端依赖
- 激活 Python 虚拟环境,执行
pip install -r requirements.txt安装后端依赖。
- 执行
pnpm dev启动通用服务。
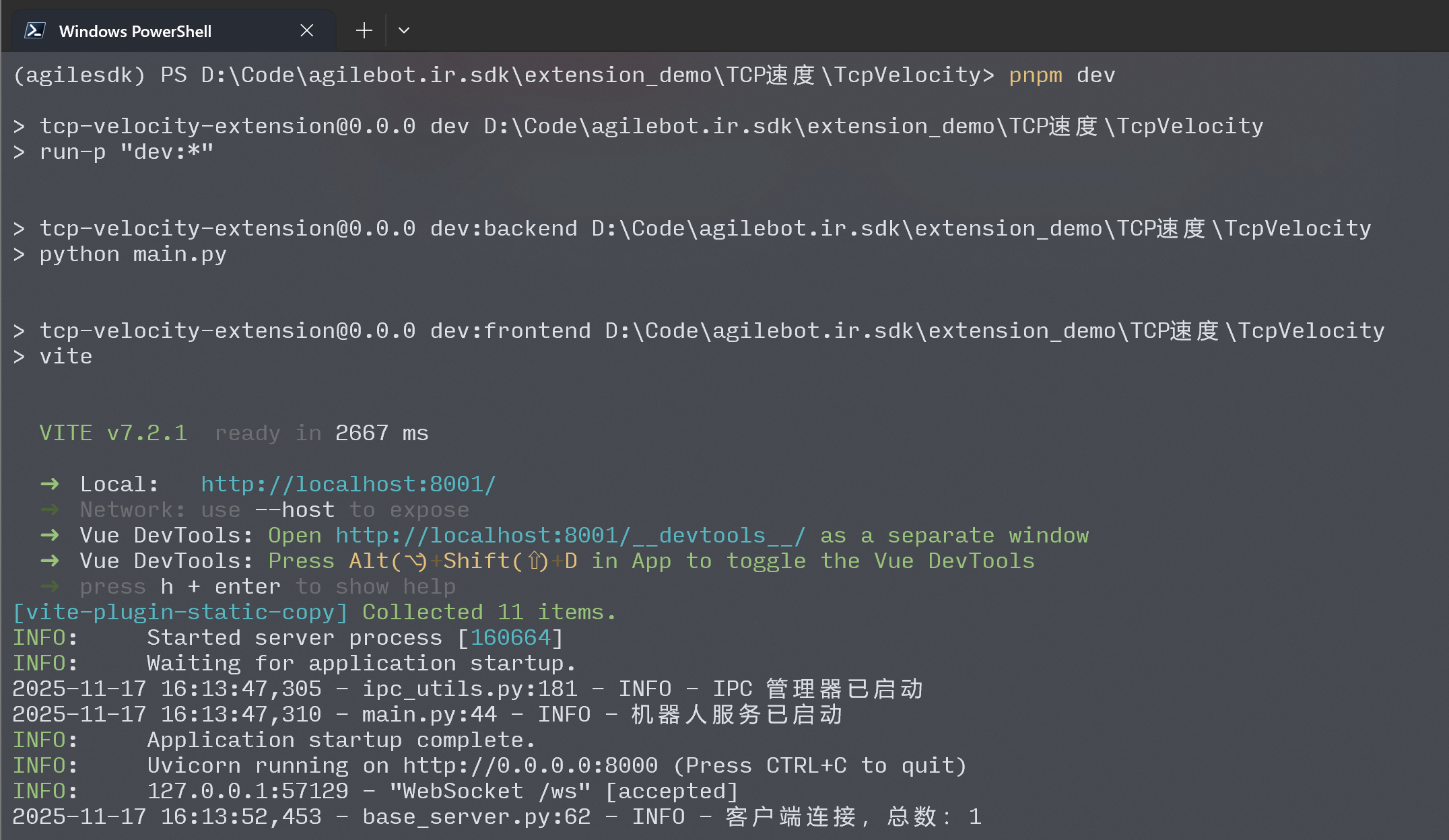
- 启动成功后浏览器会自动打开:
http://localhost:8001
- 在机器人上执行程序或示教,即可在页面上看到实时状态更新
简单服务的开发
- 打开
PowerShell,进入TCP速度/RunningStatus目录,执行python RunningStatus.py即可执行。
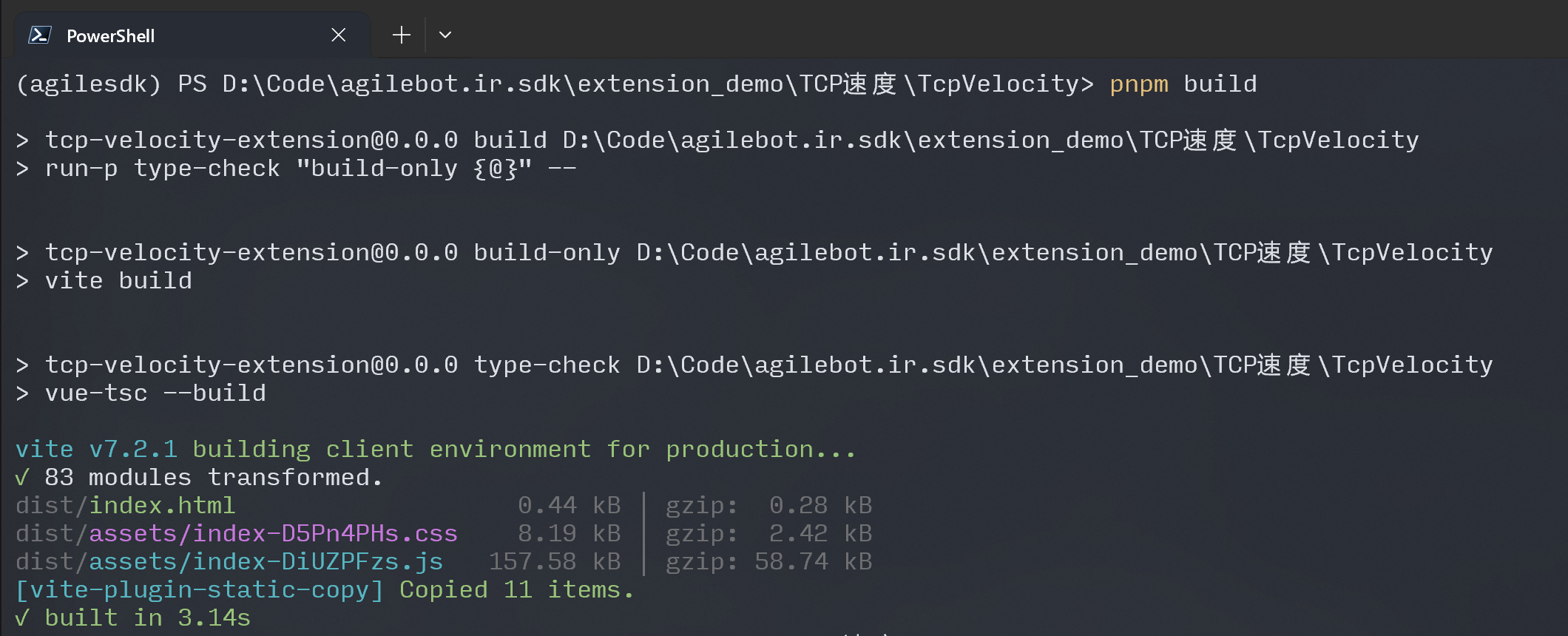
各组件的打包
通用服务的打包
打开
PowerShell,进入TCP速度/TcpVelocity目录,确保已经完成上述步骤中的安装前端依赖、安装后端依赖。执行
pnpm build编译通用服务,编译完成后会生成TCP速度/TcpVelocity/dist目录
- 使用插件打包工具打包为
TcpVelocity.gbtapp,具体步骤请参考文档:打包与安装
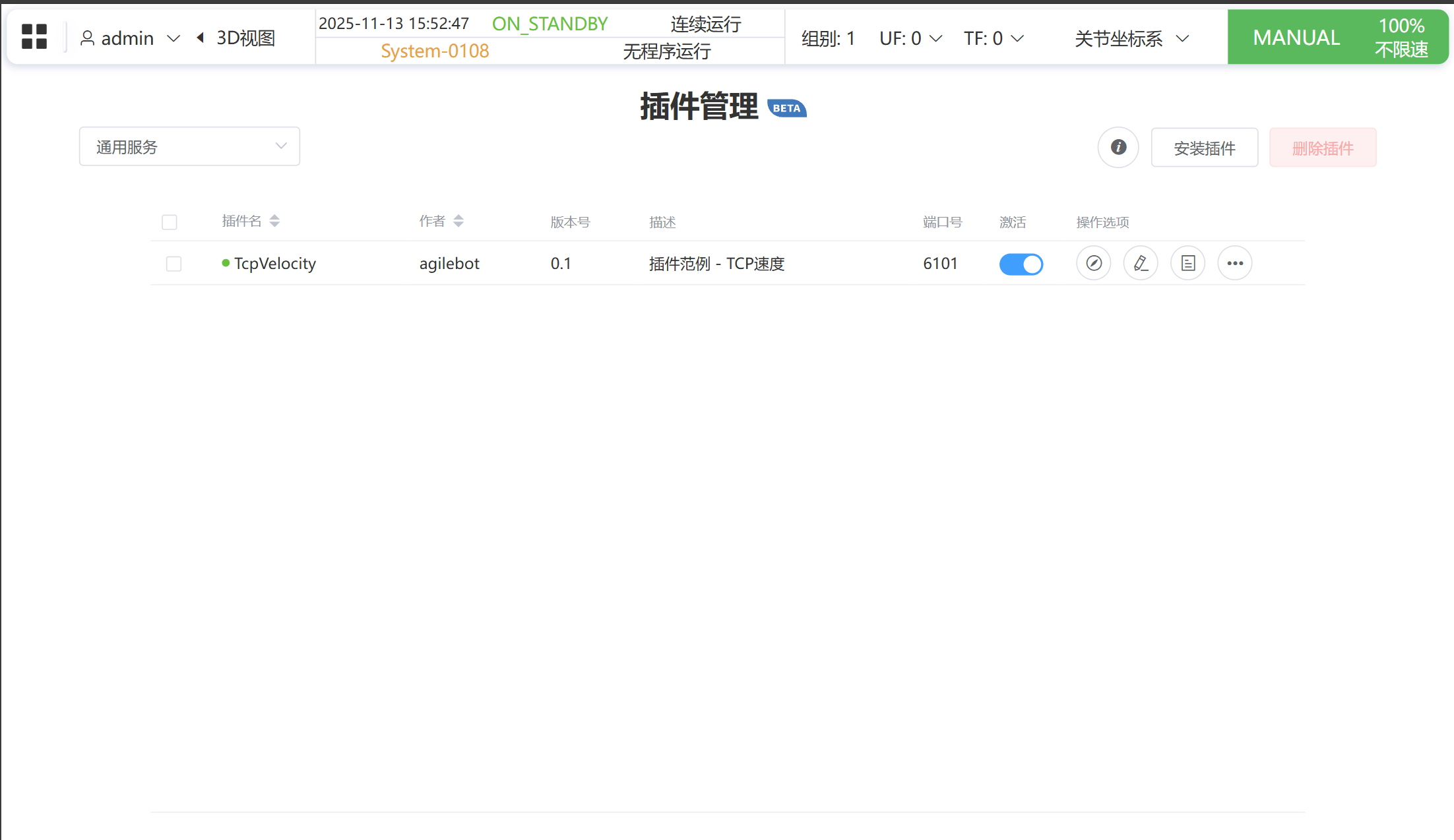
注意
打包时请选择 TCP速度/TcpVelocity/dist 目录作为打包路径。
打包完成后,可在 插件管理界面 安装并启用插件 TcpVelocity 。
简单服务的打包
- 使用插件打包工具打包为
RunningStatus.gbtapp,具体步骤请参考文档:打包与安装
注意
打包时请选择 TCP速度/RunningStatus 目录作为打包路径。
打包完成后,可在 插件管理界面 安装并启用插件 RunningStatus 。