增广夹爪插件
插件信息
- 增广夹爪后端
- 名称:rm-gripper-easy-service
- 增广夹爪 Web
- 名称:rm-gripper-web
- 品牌官网链接:https://www.rmaxis.com/servo-rotary-gripper/robustmotion-model-rgm-itg
适用范围
Copper:v7.6.0.0 及以上
安装指南
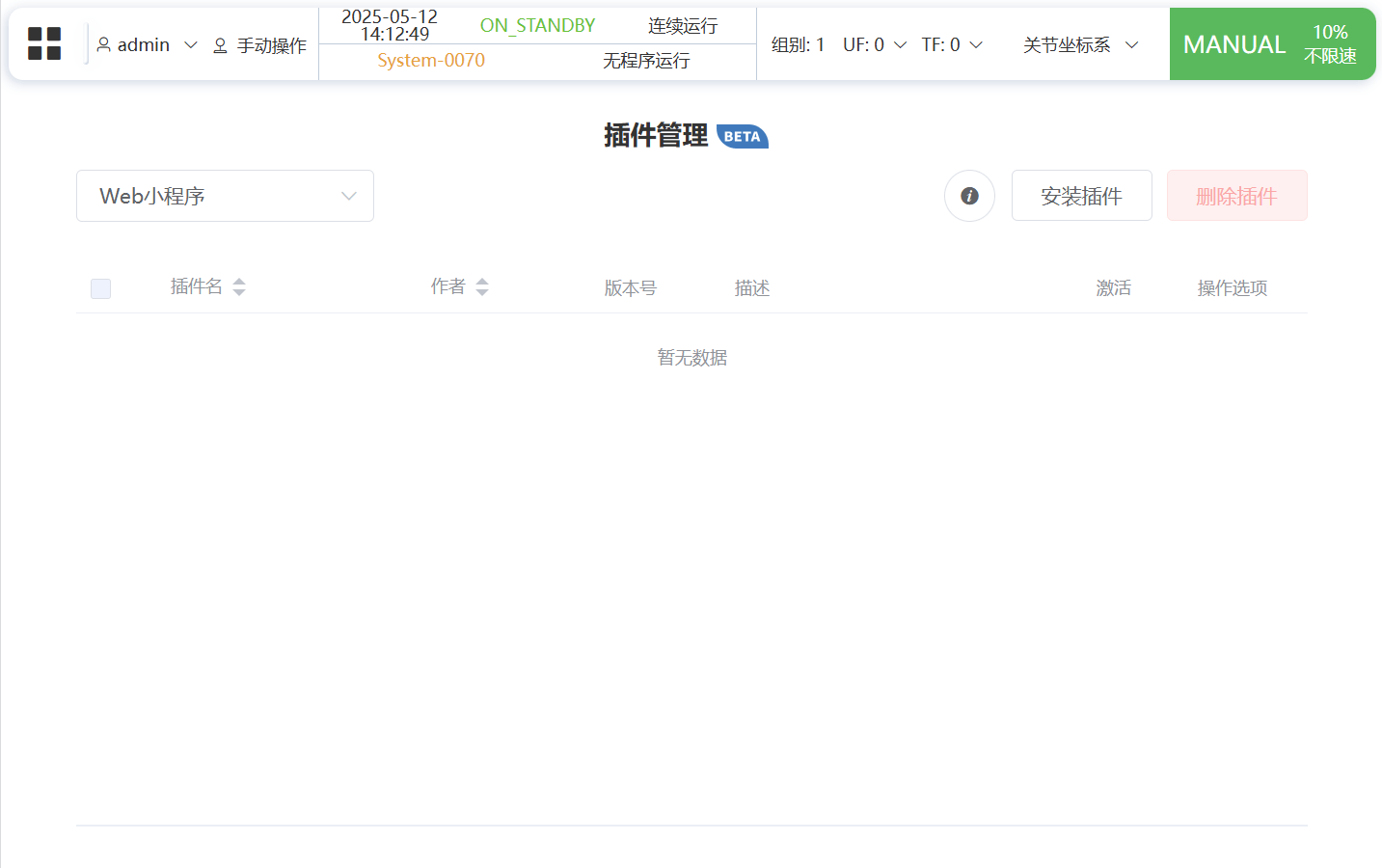
- 打开
应用 - 插件管理,点击右上角的安装插件按钮。
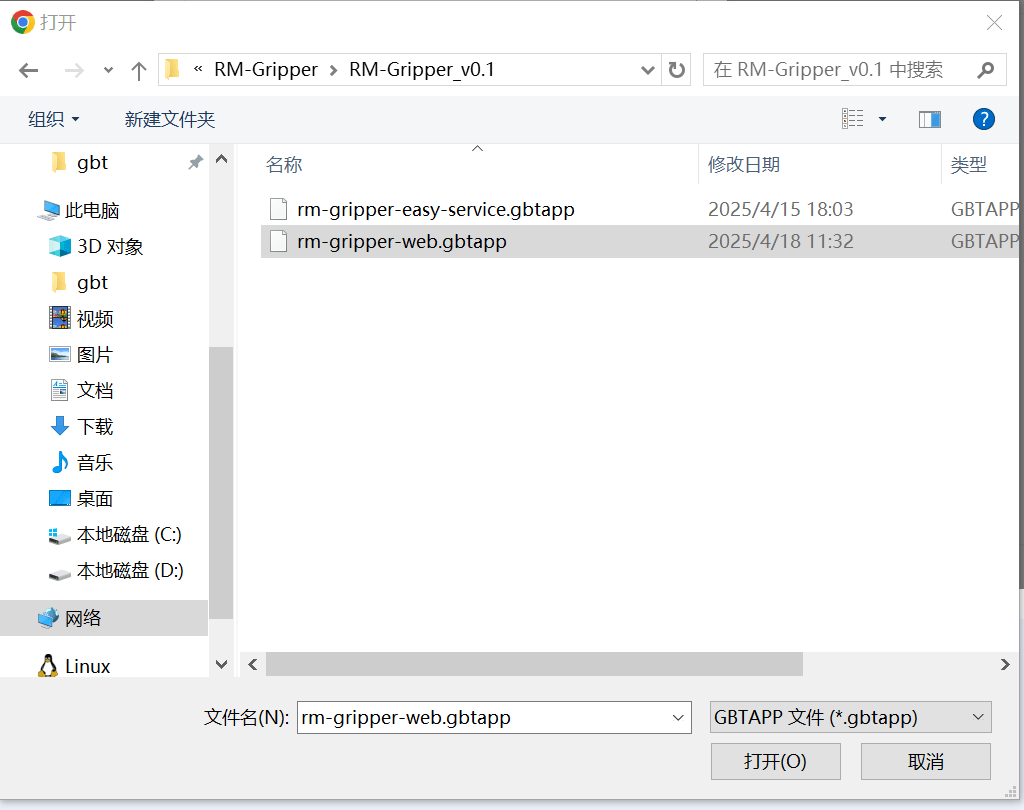
- 分别安装
rm-gripper-easy-service、rm-gripper-web
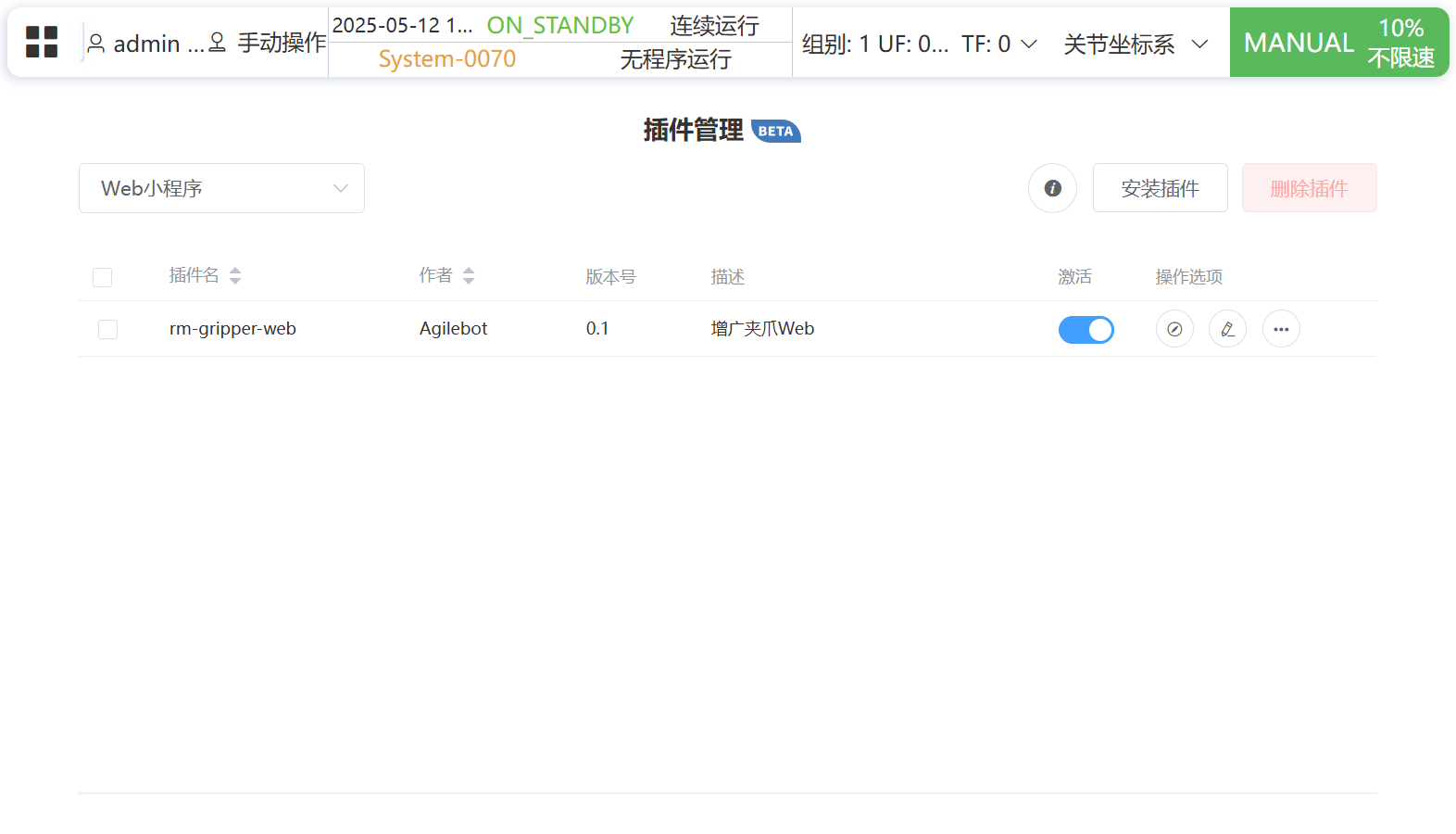
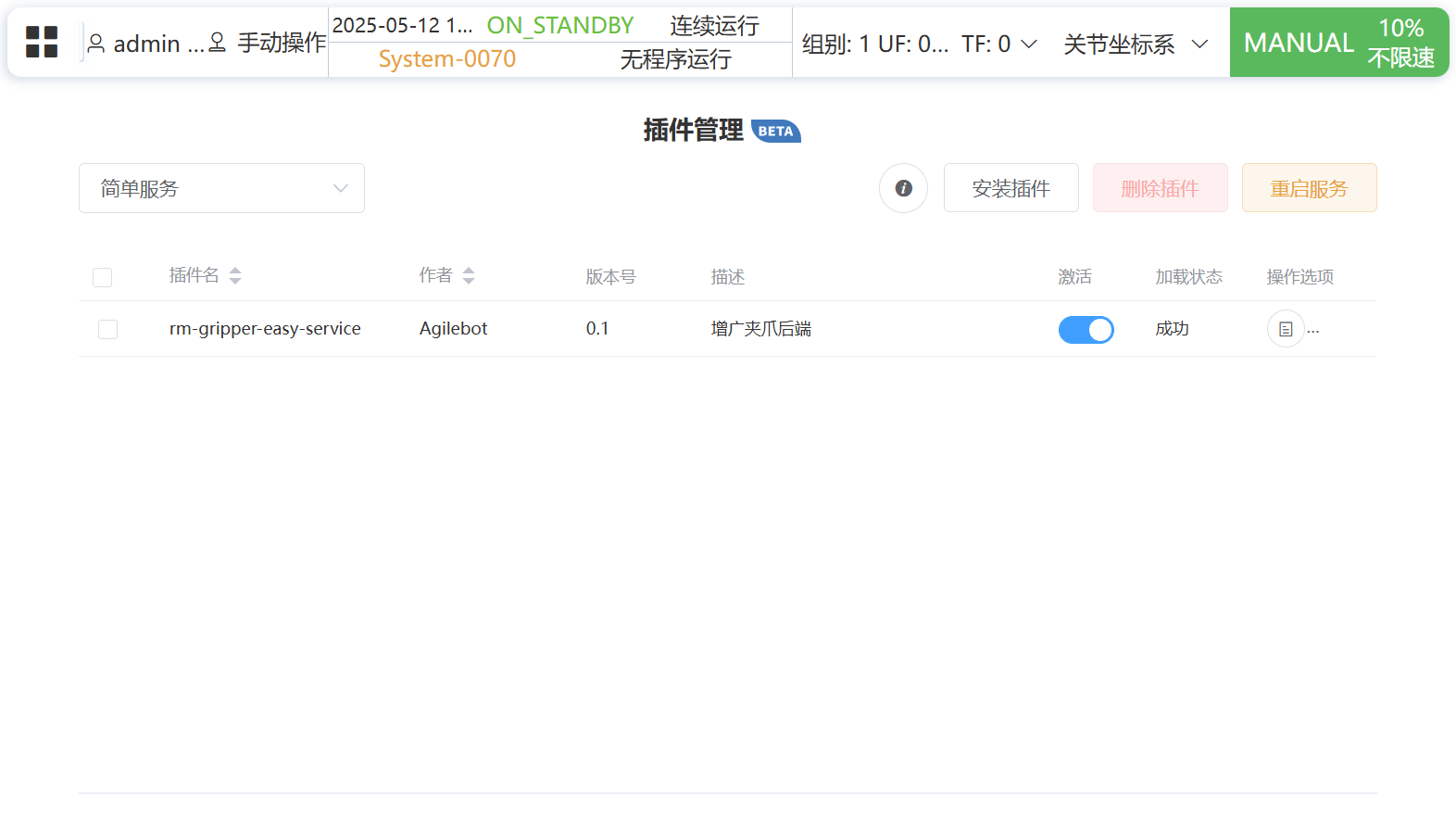
- 在
Web小程序类别中启用rm-gripper-web,在简单服务类别中启用rm-gripper-easy-service
使用说明
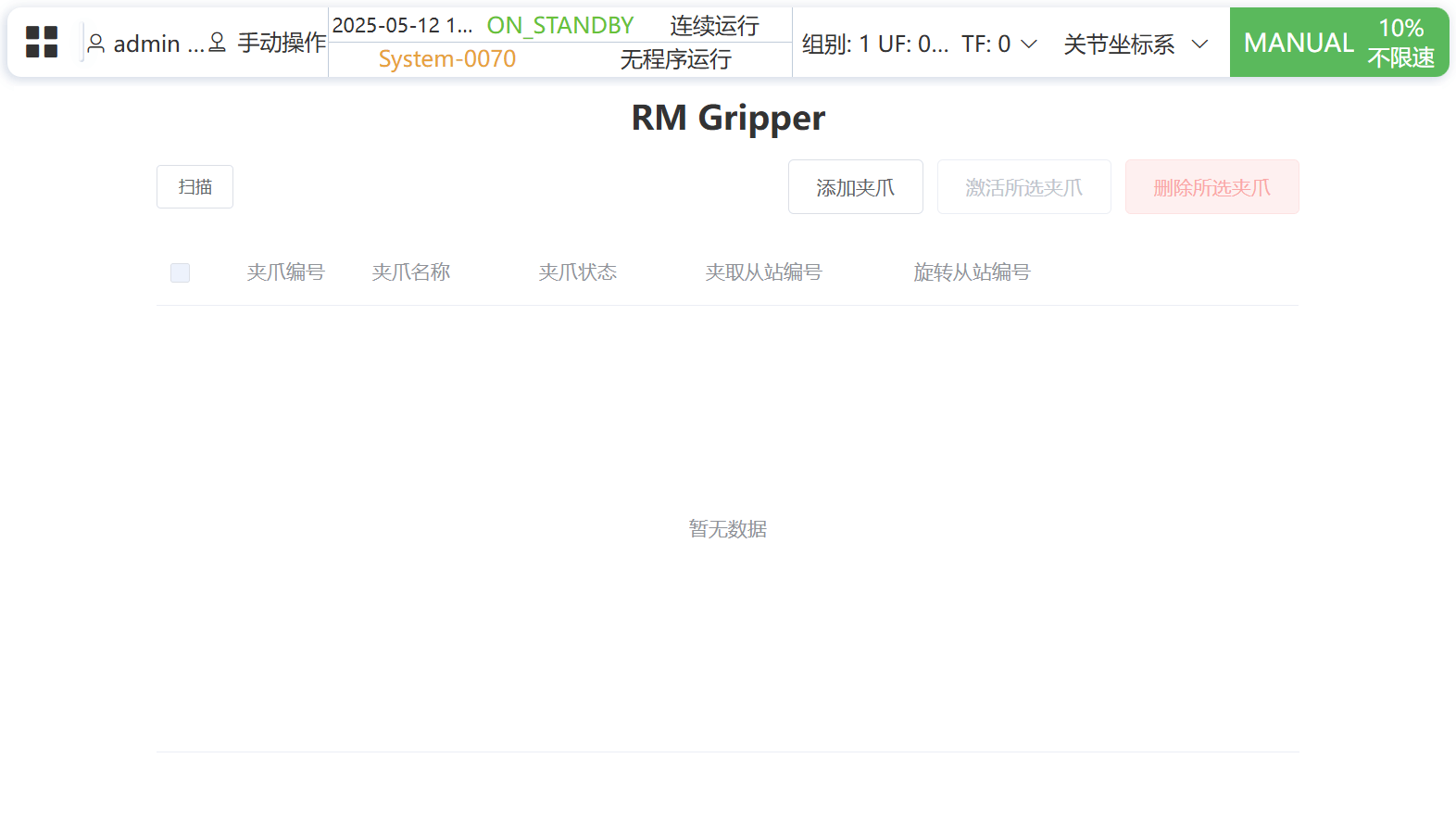
打开 应用 - 插件 - rm-gripper-web ,可进入配置界面
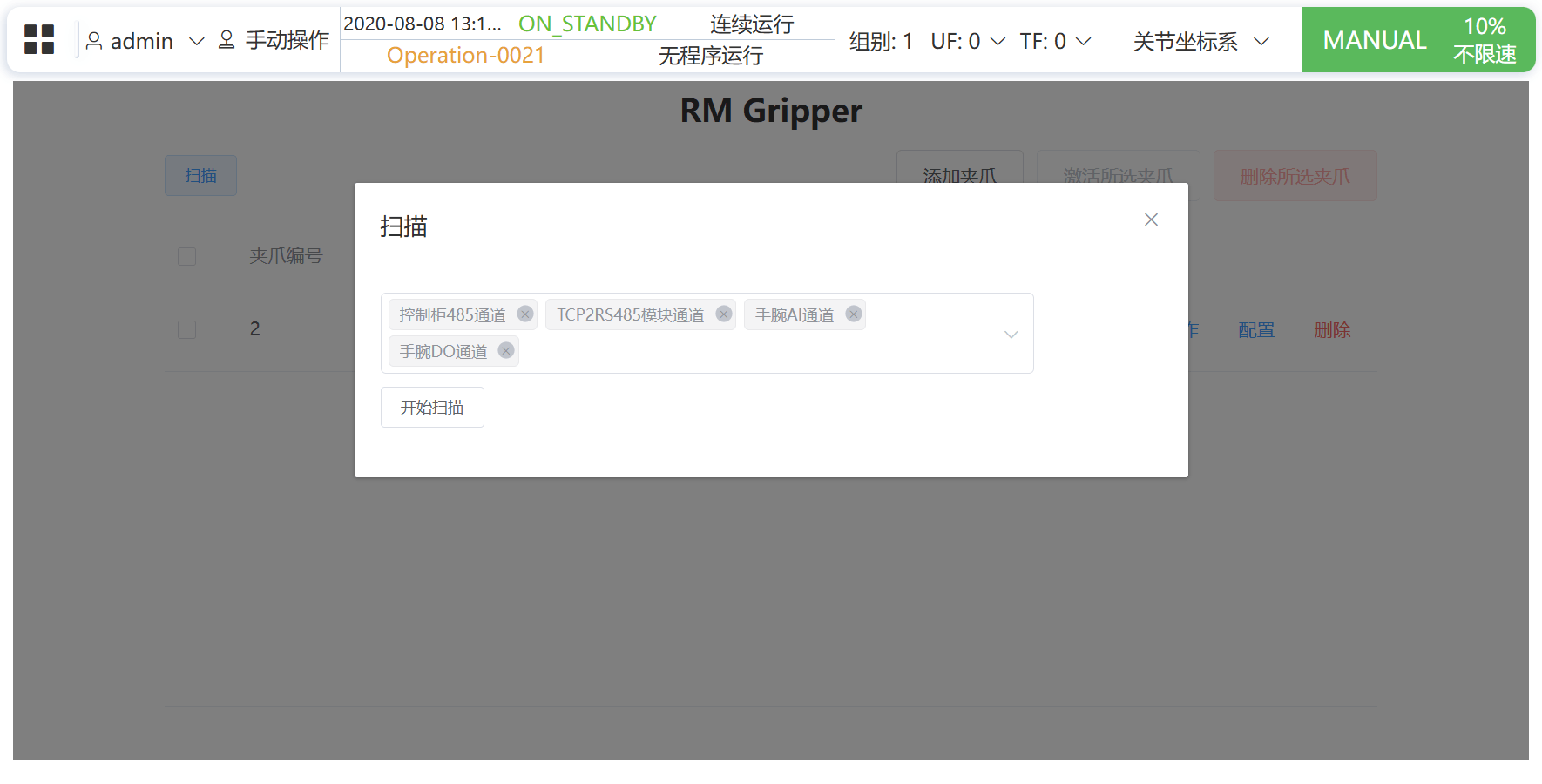
点击 扫描 ,可扫描各通道下的手爪
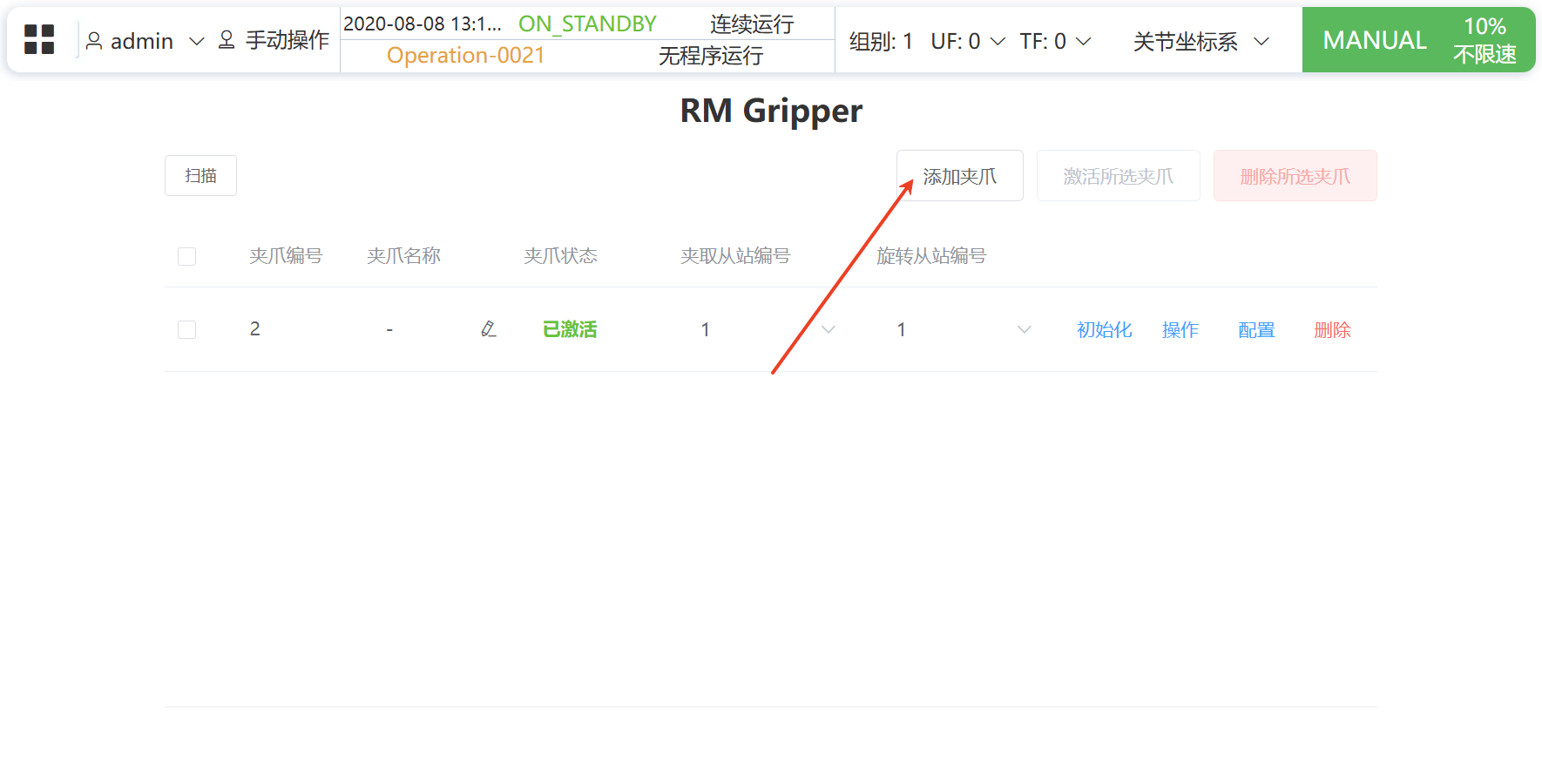
扫描后,点击 添加夹爪 ,将夹爪添加到列表中
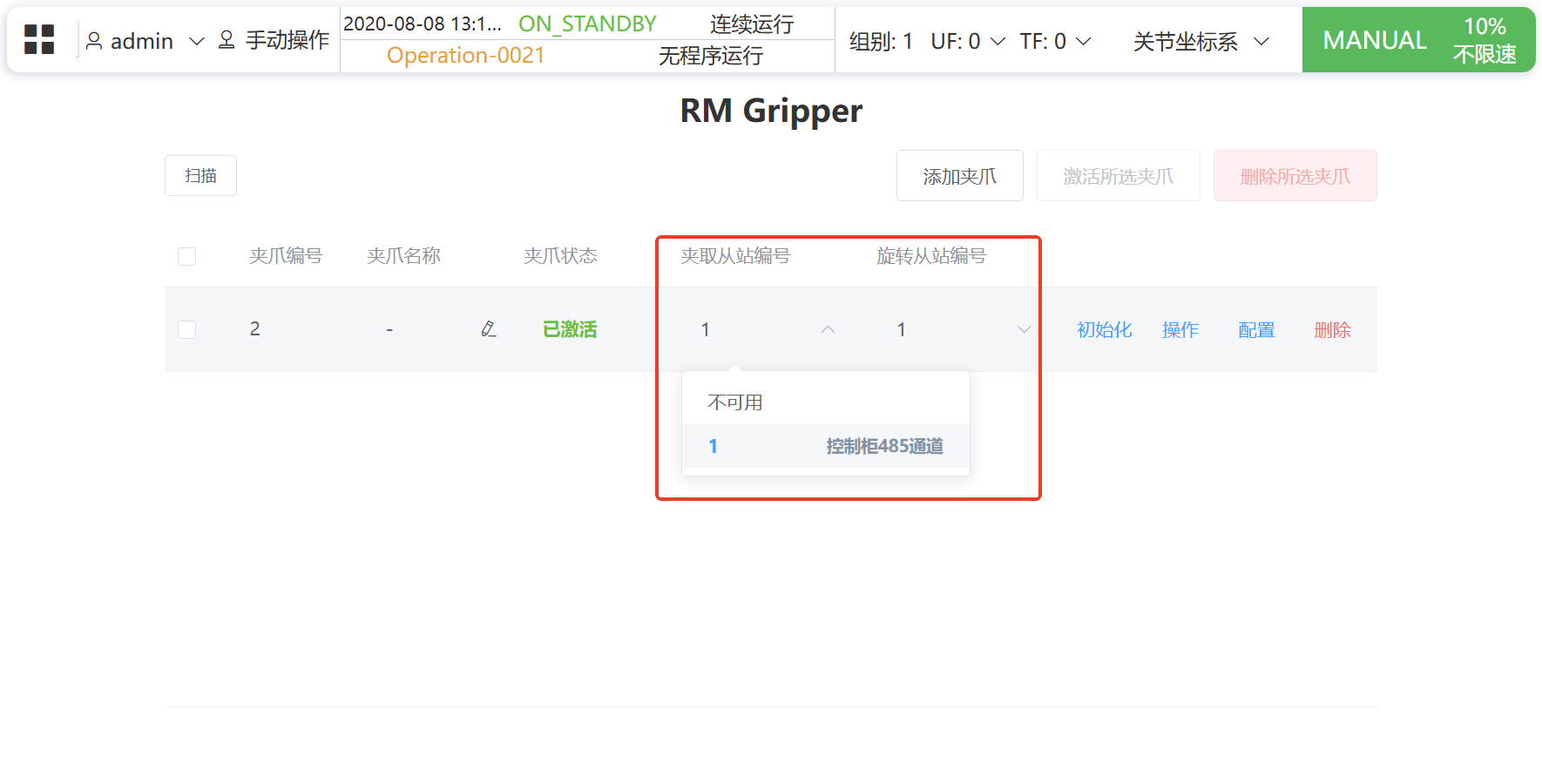
添加后,默认通道为 不可用 ,需手动配置为相应的通道
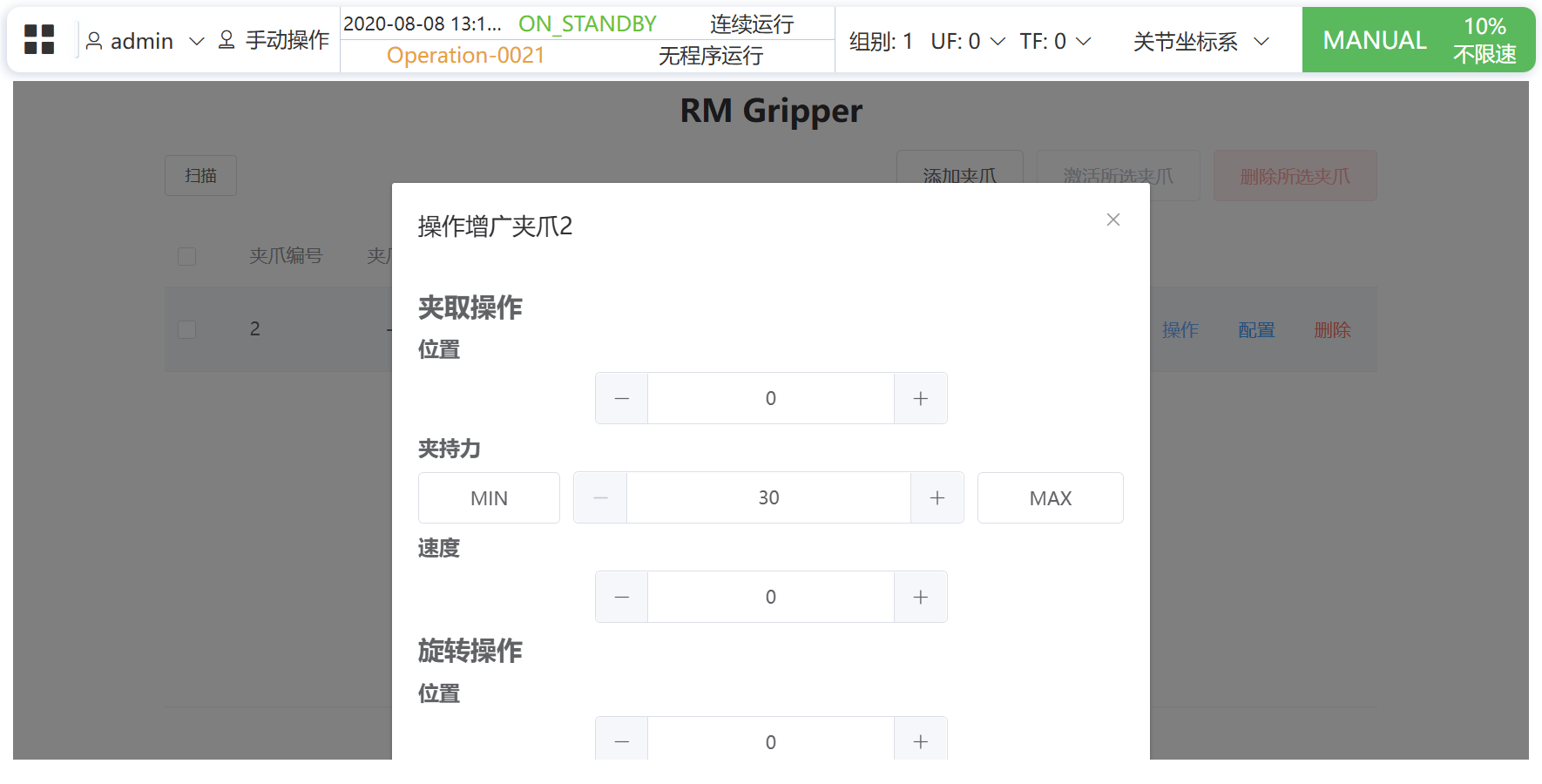
点击 操作 按钮,可对手爪进行夹取和旋转操作
点击 配置 按钮,可进入指令编辑页,具体操作说明可参考增广手册,也可点击 帮助 查看简易说明。

程序指令调用
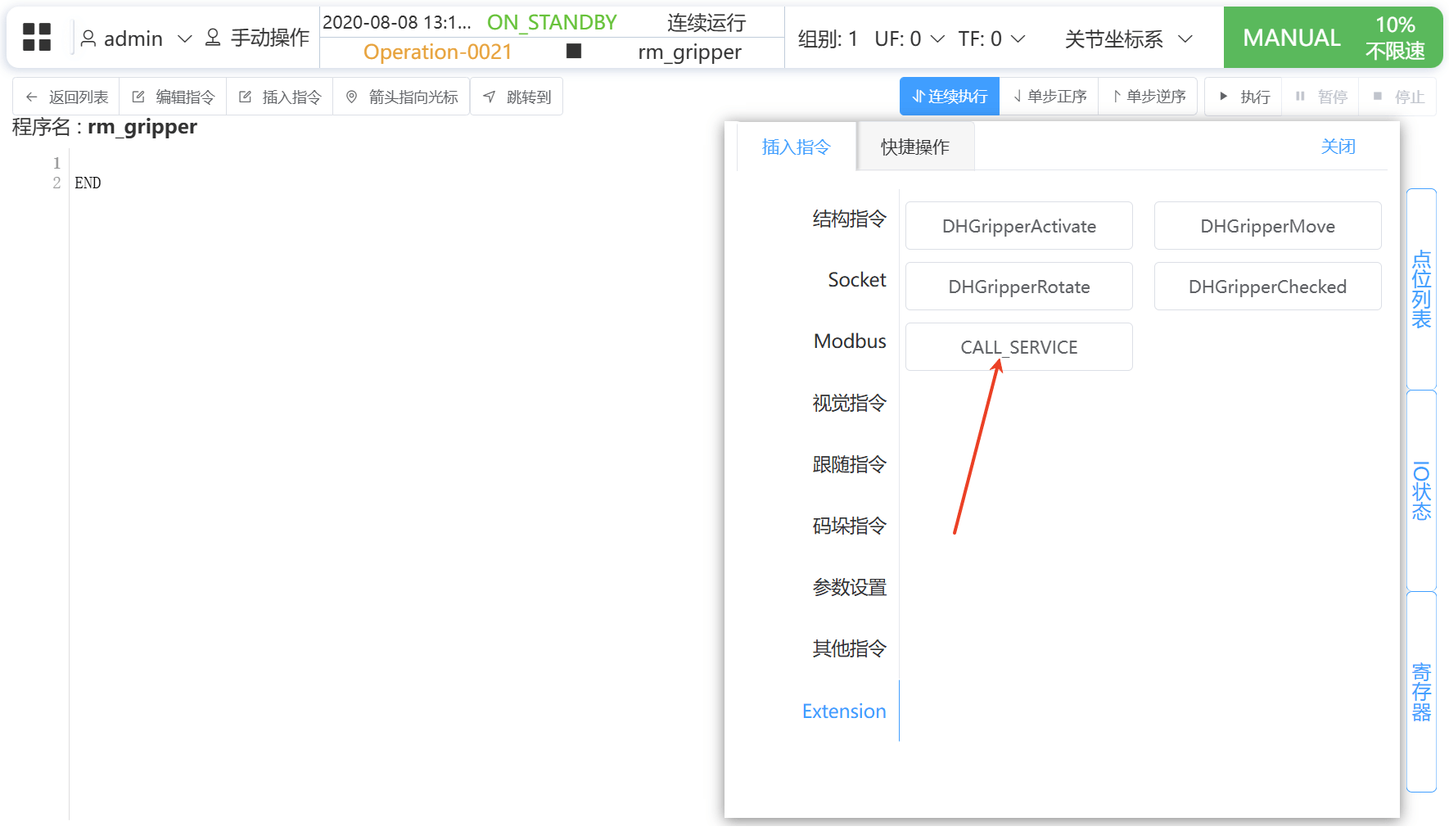
打开 程序 - 新增程序 界面,使用 CALL_SERVICE 指令可调用 增广夹爪后端 中的相关方法。
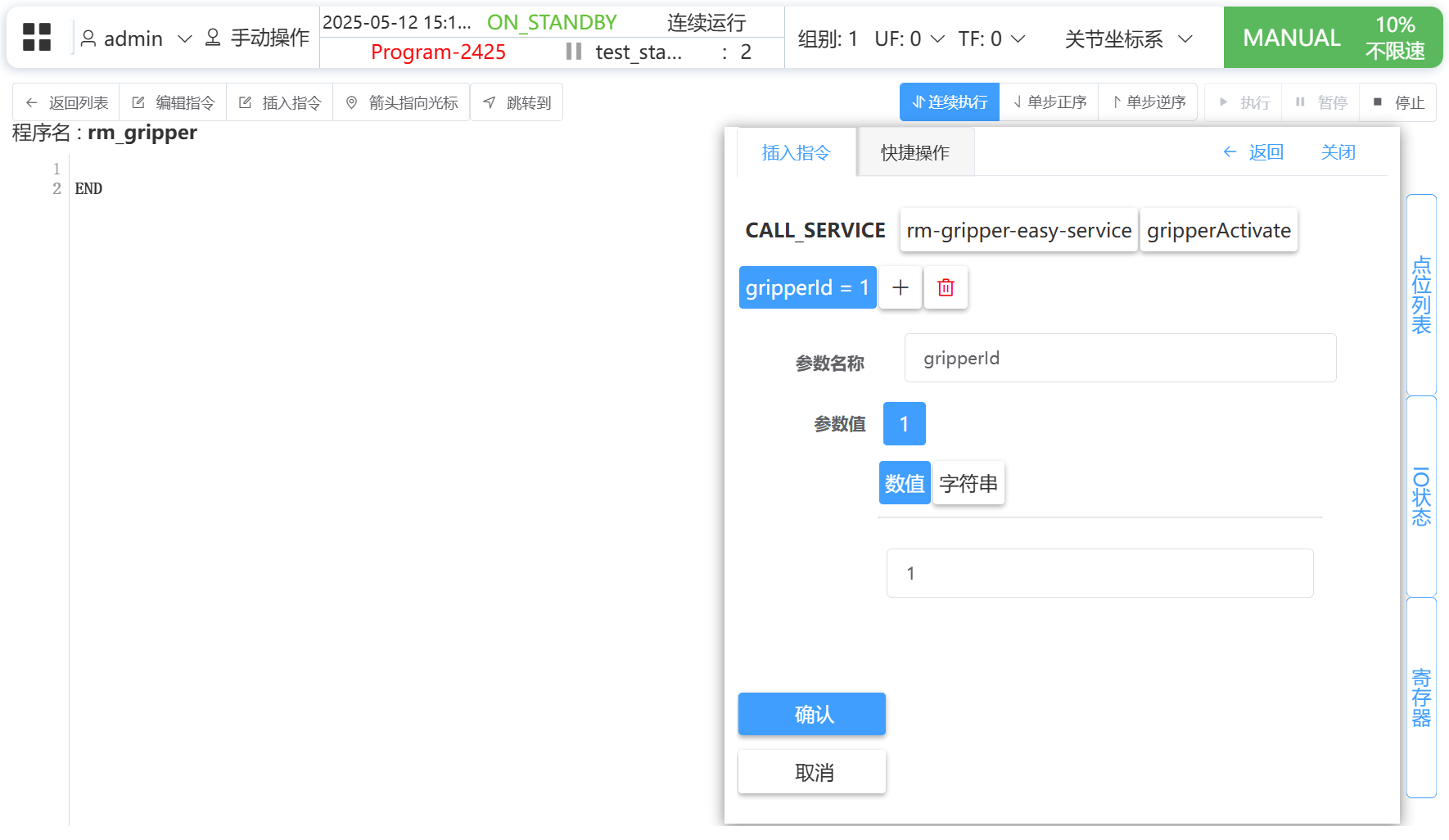
例:激活手爪 1,通过调用 rm-gripper-easy-service 服务中的 gripperActivate 指令实现,参数为 gripperId=1
以下 rm-gripper-easy-service 支持调用的指令列表:
| 指令说明 | 指令名 | 参数 |
|---|---|---|
| 激活手爪 | gripperActivate | - gripperId: 手爪 ID |
| 控制手爪移动 | gripperMove | - gripperId: 手爪 ID - position: 目标位置 - speed: 移动速度 |
| 控制手爪旋转 | gripperRotate | - gripperId: 手爪 ID - position: 目标位置 - speed: 移动速度 - force: 作用力 |
| 控制手爪伺服开关 | servo_switch | - gripperId: 手爪 ID - on: 布尔值,是否开启伺服 |
| 初始化抓手 | init_gripper | - gripperId: 手爪 ID |
| 重置手爪错误状态 | reset_error | - gripperId: 手爪 ID |
| 重置手爪的力矩状态 | reset_force | - gripperId: 手爪 ID |
| 触发执行指令 | execute_instruction | - gripperId: 手爪 ID - id: 指令 ID |
| 停止当前正在执行的指令 | stop_instruction | - gripperId: 手爪 ID |
| JOG + | forward | - gripperId: 手爪 ID - step_length: 步长,默认为 1 |
| JOG - | backward | - gripperId: 手爪 ID - step_length: 步长,默认为 1 |
操作视频
扫描设备
指令动作
更新日志
v1.0
初始版本