Robot Motion Planning with MoveIt2
This section describes how to use MoveIt 2 for motion planning of Agilebot robots. MoveIt 2 is a ROS 2–based robot motion planning framework that integrates the following core features:
- Collision Detection: Avoids collisions with the environment and the robot itself in real time during planning
- Kinematics Solvers: Provides efficient forward and inverse kinematics solvers
- Path Planning: Supports various planar and spatial planning algorithms (e.g., OMPL, CHOMP, STOMP)
- Trajectory Optimization: Smooths generated paths and enforces velocity/acceleration limits
- Trajectory Execution: Seamlessly interfaces with hardware controllers for real-time motion control
- Real-Time Replanning: Automatically updates plans when the environment or goal changes
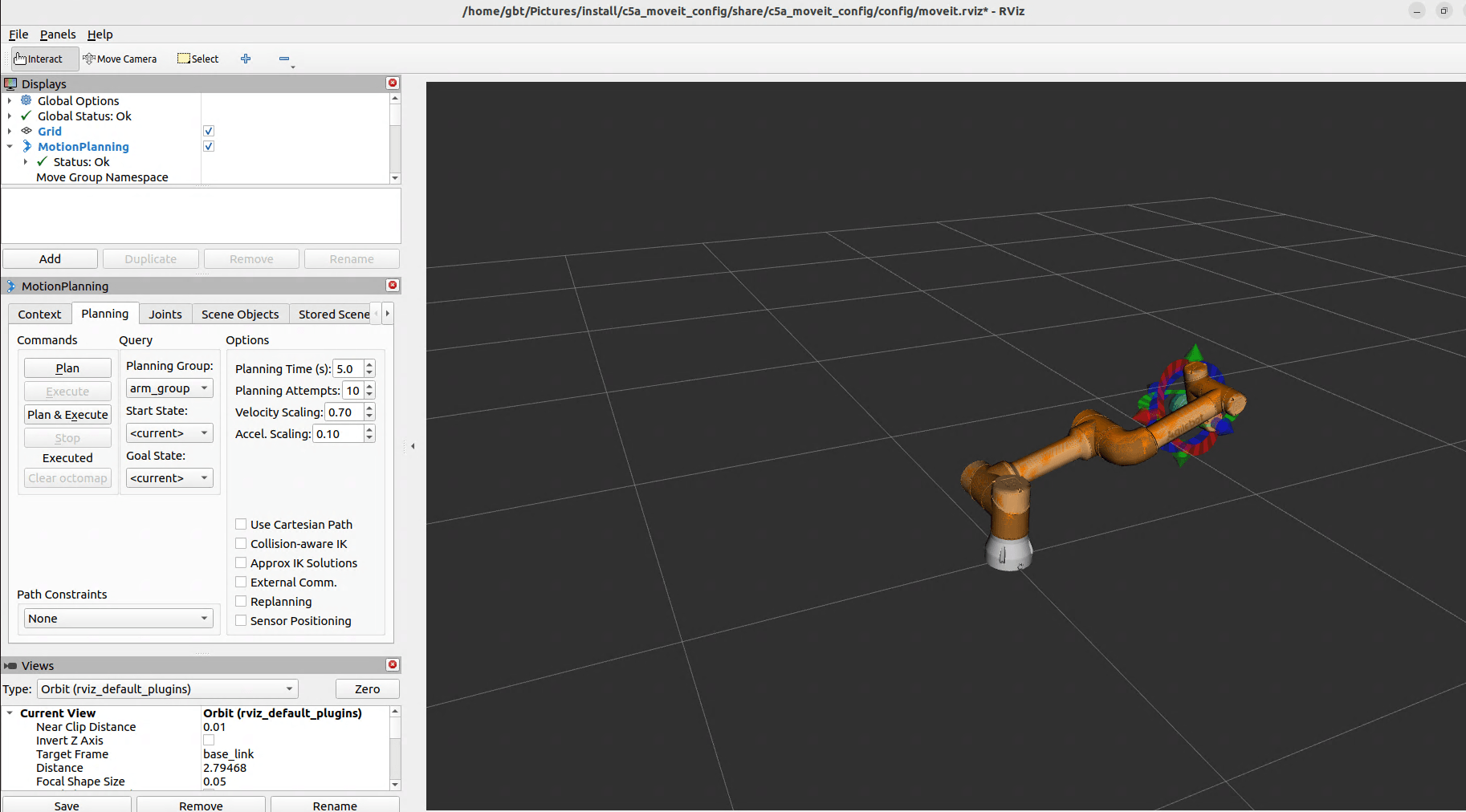
- Visualization & Debugging: Displays the planning pipeline in RViz plugins and supports interactive goal setting and parameter tuning
With MoveIt 2, you can rapidly generate and execute high-quality arm trajectories in both simulation and on real robots, streamlining your development and debugging workflows.
To perform path planning and motion control for Shanghai Agilebot Robotics products using MoveIt2, run:
bash
ros2 launch <robot type>_moveit_config demo.launch.pyFor example, to launch MoveIt2 for the C5A model:
bash
ros2 launch c5a_moveit_config demo.launch.pyOther robot models can be launched similarly:
bash
# C7A robot
ros2 launch c7a_moveit_config demo.launch.py
# C12A robot
ros2 launch c12a_moveit_config demo.launch.py
# C16A robot
ros2 launch c16a_moveit_config demo.launch.pyThis will start the MoveIt2 demonstration interface, enabling path planning and other operations.