在 Isaac Sim 中显示捷勃特机器人模型
本教程将指导您如何在 NVIDIA Isaac Sim 中加载和显示捷勃特机器人模型。
前置条件
确保您已经完成了 Isaac Sim 环境配置。
加载机器人模型
方法 1:使用 Python 脚本加载
python
#!/usr/bin/env python3
"""
最简单的 USD 显示示例 - 使用 Isaac Sim 默认地面
直接加载指定的 USD 文件并显示
"""
import sys
import os
# 直接指定 USD 文件路径(请修改为你的文件路径)
USD_PATH = "/home/gbt/ws/usd/gbt-c5a/gbt-c5a.usd" # 修改为你的 USD 文件路径
# 检查文件是否存在
if not os.path.exists(USD_PATH):
print(f"错误:文件不存在:{USD_PATH}")
print("请修改脚本中的 USD_PATH 变量为正确的文件路径")
sys.exit(1)
try:
# 启动 Isaac Sim
from isaacsim import SimulationApp
# 创建模拟应用(显示窗口)
simulation_app = SimulationApp({"headless": False})
import isaacsim.core.experimental.utils.stage as stage_utils
import omni.timeline
from isaacsim.core.api.objects.ground_plane import GroundPlane
# 创建新舞台
stage_utils.create_new_stage()
# 添加地面 (Isaac Sim 官方 API)
print("正在添加默认地面...")
GroundPlane(prim_path="/World/defaultGroundPlane", z_position=0)
# 添加光照
print("正在添加环境光照...")
from pxr import Sdf, UsdLux
import omni.usd
stage = omni.usd.get_context().get_stage()
distantLight = UsdLux.DistantLight.Define(stage, Sdf.Path("/DistantLight"))
distantLight.CreateIntensityAttr(1500)
# 添加 USD 文件到舞台
print(f"正在加载:{USD_PATH}")
usd_prim = stage_utils.add_reference_to_stage(
usd_path=USD_PATH, path="/World/gbt_c5a"
)
usd_prim.GetVariantSet("Gripper").SetVariantSelection("None") # without gripper
if usd_prim is None:
print("警告:无法加载 USD 文件")
else:
print("USD 文件加载成功!")
# 播放模拟
timeline = omni.timeline.get_timeline_interface()
timeline.play()
print("模型已显示,按 Ctrl+C 退出...")
# 保持运行
while simulation_app.is_running():
simulation_app.update()
except ImportError as e:
print(f"导入错误:{e}")
print("请确保 Isaac Sim 已正确安装和配置")
sys.exit(1)
except KeyboardInterrupt:
print("\n正在退出...")
except Exception as e:
print(f"运行时错误:{e}")
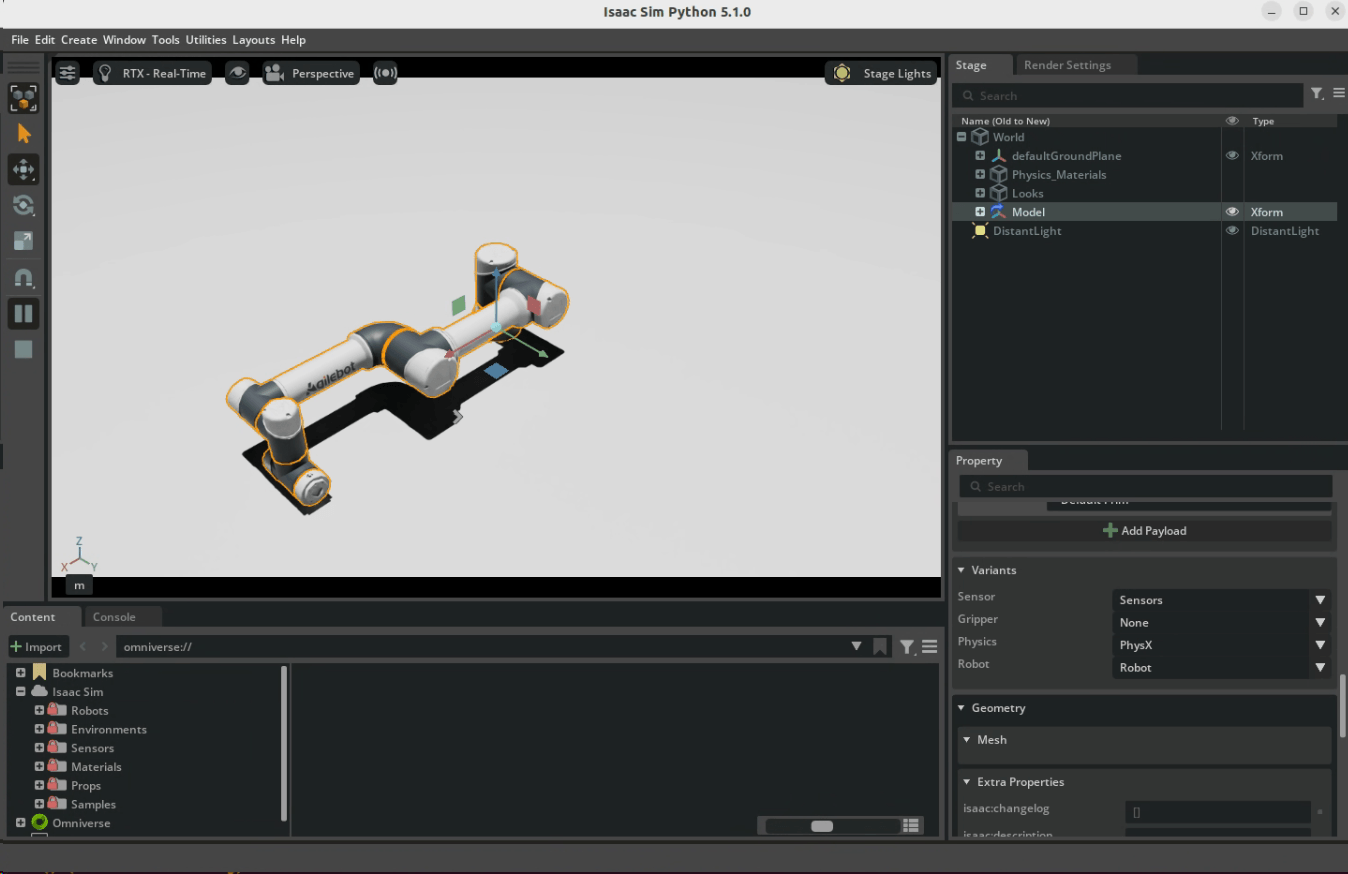
sys.exit(1)方法 2:使用 Isaac Sim GUI 加载
- 启动 Isaac Sim GUI
- 菜单
File->open导航到上一章节下载的文件夹 - 打开对应的 usd 文件
支持的机器人型号
Agilebot Isaac Sim 支持以下机器人型号:
| 型号 | 描述 | USD 文件名 |
|---|---|---|
| gbt-c5a | 5kg 负载协作机器人 | gbt_c5a.usd |
| gbt-c7a | 7kg 负载协作机器人 | gbt_c7a.usd |
| gbt-c12a | 12kg 负载协作机器人 | gbt_c12a.usd |
| gbt-c16a | 16kg 负载协作机器人 | gbt_c16a.usd |
常见问题
Q: 机器人 USD 文件无法加载
A: 请检查 USD 文件路径是否正确
Q: 机器人显示为灰色或缺少纹理
A: 确保 USD 文件包含正确的材质和纹理引用。检查资产目录结构是否完整。
下一步
成功加载机器人模型后,您可以尝试以下示例: