上海捷勃特机器人(Agilebot)- Isaac Sim 集成
项目概述
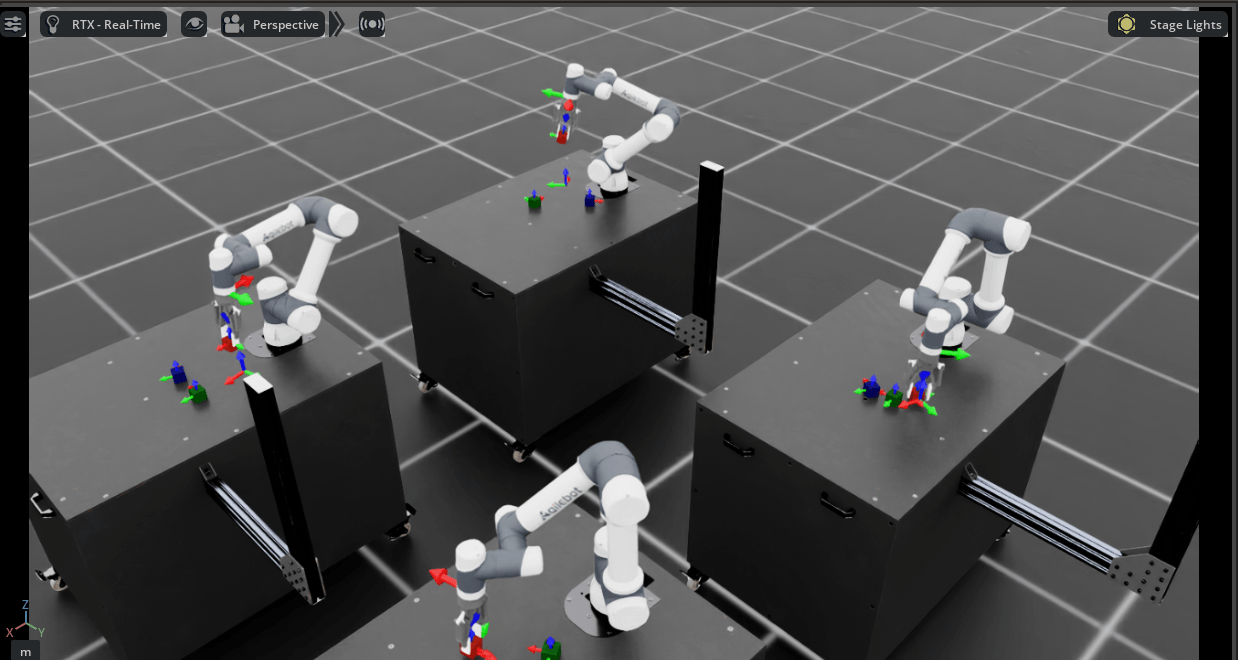
本项目提供上海捷勃特机器人的 Isaac Sim 集成,旨在帮助用户在 NVIDIA Isaac Sim 仿真环境中进行机器人开发和测试。集成包含以下内容:
多型号支持
支持多种 Agilebot 机器人型号,包括 gbt-c5a、gbt-c7a、gbt-c12a、gbt-c16a。RMPflow 运动控制
集成 RMPflow(Robot Motion Policy Flow)运动策略框架,实现平滑、安全的运动规划。丰富的功能演示
包含完整的任务示例,包括目标跟随、抓取和放置、堆叠等。MoveIt 集成
支持通过 ROS 2 + MoveIt 进行机器人控制。手腕相机抓取
支持带有手腕相机的抓取和放置任务,并支持视频录制功能。运动学验证
提供正 / 逆运动学验证工具。
该集成通过提供完整的仿真开发资源,降低机器人开发难度,提升开发效率。
抓取和放置演示
抓取和放置演示展示了 Agilebot 机器人如何识别、抓取物体并将其放置到指定位置。该演示结合了运动规划、抓取控制和视觉感知功能。
演示特点
- 精确抓取:使用 RMPflow 运动策略实现精确的抓取控制
- 灵活放置:支持多种放置位置和姿态
- 视觉感知:集成腕部相机进行物体识别
- 支持手腕相机:支持通过手腕录制整个操作过程
相关资源
文档目录
Isaac 生态介绍
NVIDIA Isaac 生态系统是一套完整的机器人开发和仿真平台,为机器人应用的开发、测试和部署提供了全面的解决方案。
Isaac 生态核心组件
| 组件 | 描述 | 适用场景 |
|---|---|---|
| Isaac Sim | 基于 NVIDIA Omniverse 的机器人仿真平台,提供高保真的物理仿真和渲染 | 机器人仿真、算法验证、场景测试 |
| Isaac Lab | 基于 Isaac Sim 的强化学习和机器人学习框架,支持大规模并行训练 | 强化学习、机器人学习、策略训练 |
| Isaac SDK | 用于构建机器人应用程序的 C++ 和 Python 库,包含感知、规划和控制模块 | 机器人应用开发、算法集成 |
| Isaac ROS | NVIDIA 提供的 ROS 2 加速包,利用 GPU 加速机器人感知和规划 | ROS 2 应用开发、性能优化 |
| Isaac Nucleus | 用于管理机器人资产和数据的云服务 | 资产管理、数据共享 |
Isaac Sim 主要特性
- 高保真物理仿真:基于 PhysX 的高精度物理引擎
- 真实感渲染:利用 NVIDIA RTX 技术实现光线追踪渲染
- 多机器人支持:支持同时仿真多个机器人
- 传感器仿真:支持相机、激光雷达、深度传感器等多种传感器
- ROS 2 集成:与 ROS 2 无缝集成,支持 ROS 2 节点通信
- 云仿真:支持在云端运行大规模仿真任务
学习资源
相关链接
- GitHub 项目: https://github.com/sh-agilebot/agilebot_isaac_sim
- Isaac Lab 训练: https://github.com/sh-agilebot/agilebot_isaac_lab
- USD 资产仓库: https://github.com/sh-agilebot/agilebot_isaac_usd_assets
- NVIDIA Isaac Sim: https://developer.nvidia.com/isaac-sim
- USD 文件下载: https://www.sh-agilebot.com/159/#zlxz_sec
联系方式
如果您有任何建议或希望参与项目的开发,请通过以下方式联系我们:
- 公司官网:https://www.sh-agilebot.com/
- 邮箱: info@agilebot.com.cn
- 电话:
400-996-7588