Agilebot Robotics - Isaac Sim Integration
Project Overview
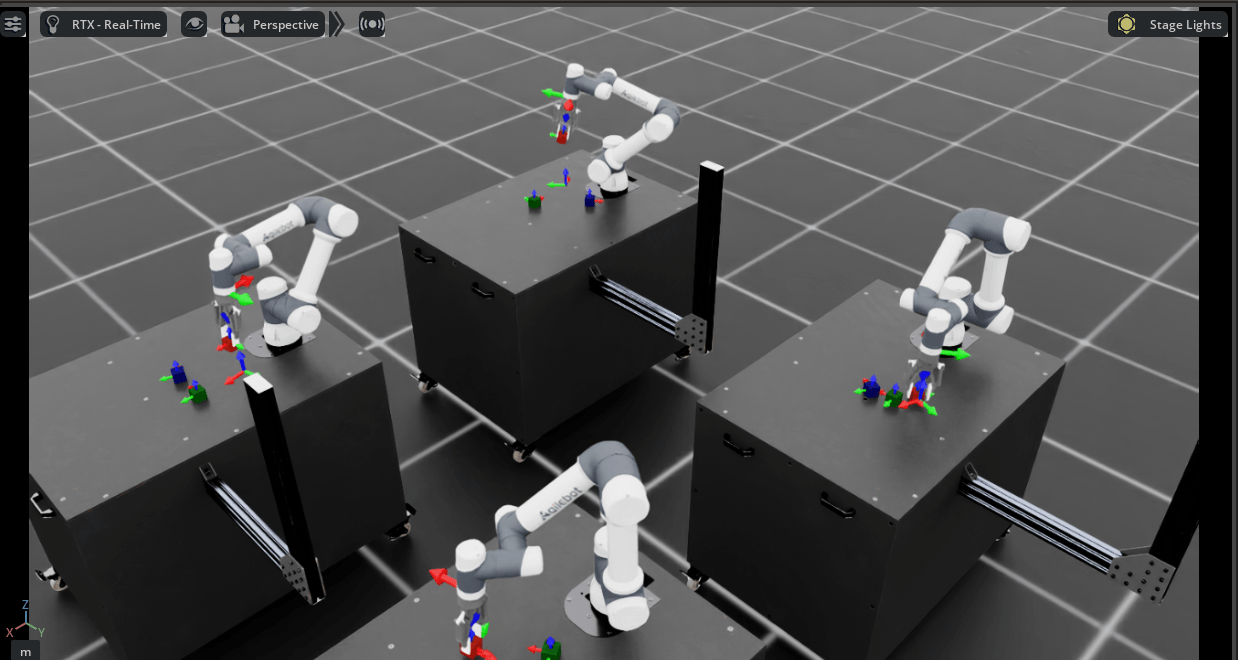
This project provides Isaac Sim integration for Agilebot robots, designed to help users develop and test robots in NVIDIA Isaac Sim simulation environment. The integration includes:
Multi-Model Support
Supports multiple Agilebot robot models including gbt-c5a, gbt-c7a, gbt-c12a, gbt-c16a.RMPflow Motion Control
Integrated RMPflow (Robot Motion Policy Flow) motion policy framework for smooth and safe motion planning.Rich Function Demos
Complete task examples including target following, pick and place, stacking, etc.MoveIt Integration
Support for robot control through ROS 2 + MoveIt.Wrist Camera Grasping
Support for pick and place tasks with wrist camera, including video recording functionality.Kinematics Verification
Forward/inverse kinematics verification tools.
This integration reduces robot development complexity and improves development efficiency through comprehensive simulation development resources.
Pick and Place Demo
The pick and place demo demonstrates how to Agilebot robot identifies, grasps objects, and places them at specified locations. This demo combines motion planning, grasping control, and visual perception capabilities.
Demo Features
- Precise Grasping: Achieve precise grasping control using RMPflow motion policy
- Flexible Placement: Support for multiple placement positions and orientations
- Visual Perception: Integrated wrist camera for object recognition
- Wrist Camera Support: Support for recording entire operation process through wrist camera
Related Resources
Documentation Directory
Isaac Ecosystem Introduction
NVIDIA Isaac ecosystem is a complete robot development and simulation platform, providing comprehensive solutions for robot application development, testing, and deployment.
Isaac Ecosystem Core Components
| Component | Description | Use Case |
|---|---|---|
| Isaac Sim | Robot simulation platform based on NVIDIA Omniverse, providing high-fidelity physics simulation and rendering | Robot simulation, algorithm verification, scenario testing |
| Isaac Lab | Reinforcement learning and robot learning framework based on Isaac Sim, supporting large-scale parallel training | Reinforcement learning, robot learning, policy training |
| Isaac SDK | C++ and Python libraries for building robot applications, including perception, planning, and control modules | Robot application development, algorithm integration |
| Isaac ROS | ROS 2 acceleration packages provided by NVIDIA, utilizing GPU acceleration for robot perception and planning | ROS 2 application development, performance optimization |
| Isaac Nucleus | Cloud service for managing robot assets and data | Asset management, data sharing |
Isaac Sim Key Features
- High-Fidelity Physics Simulation: High-precision physics engine based on PhysX
- Realistic Rendering: Ray-tracing rendering using NVIDIA RTX technology
- Multi-Robot Support: Support for simulating multiple robots simultaneously
- Sensor Simulation: Support for various sensors including cameras, LiDAR, depth sensors
- ROS 2 Integration: Seamless integration with ROS 2, supporting ROS 2 node communication
- Cloud Simulation: Support for running large-scale simulation tasks in the cloud
Learning Resources
- Isaac Sim Official Documentation
- Isaac Lab Documentation
- Isaac ROS Documentation
- NVIDIA Developer Forum
Related Links
- GitHub Project: https://github.com/sh-agilebot/agilebot_isaac_sim
- Isaac Lab Training: https://github.com/sh-agilebot/agilebot_isaac_lab
- USD Assets Repository: https://github.com/sh-agilebot/agilebot_isaac_usd_assets
- NVIDIA Isaac Sim: https://developer.nvidia.com/isaac-sim
- USD Files Download: https://www.sh-agilebot.com/159/#zlxz_sec
Contact Information
If you have any suggestions or want to contribute to this project, please contact us through the following methods:
- Company Website: https://www.sh-agilebot.com/
- Email: info@agilebot.com.cn
- Phone:
400-996-7588